
Производители устройств, как правило, считаются владельцами частных ресурсов, созданных для каждого устройства. Поэтому их инженерные усилия часто сосредоточены на разработке отдельных устройств ; практически не уделяется внимания обеспечению единообразия работы других устройств в экосистеме.
В противоположность этому, разработчики стремятся создавать приложения, которые работают на всех телефонах Android в экосистеме, независимо от технических характеристик каждого устройства. Такое различие в подходах может привести к проблеме фрагментации, например, аппаратные возможности некоторых телефонов не соответствуют ожиданиям разработчиков приложений. Таким образом, если API тактильной обратной связи работают на одних телефонах Android, но не на других, результатом становится непоследовательная экосистема. Именно поэтому конфигурация оборудования играет решающую роль в обеспечении возможности производителям внедрять API тактильной обратной связи Android на каждом устройстве.
На этой странице представлен пошаговый контрольный список для настройки соответствия аппаратного обеспечения требованиям оптимального использования API тактильной обратной связи Android.
На следующем рисунке показано формирование общих знаний между производителями устройств и разработчиками, что является критически важным шагом в создании целостной экосистемы:
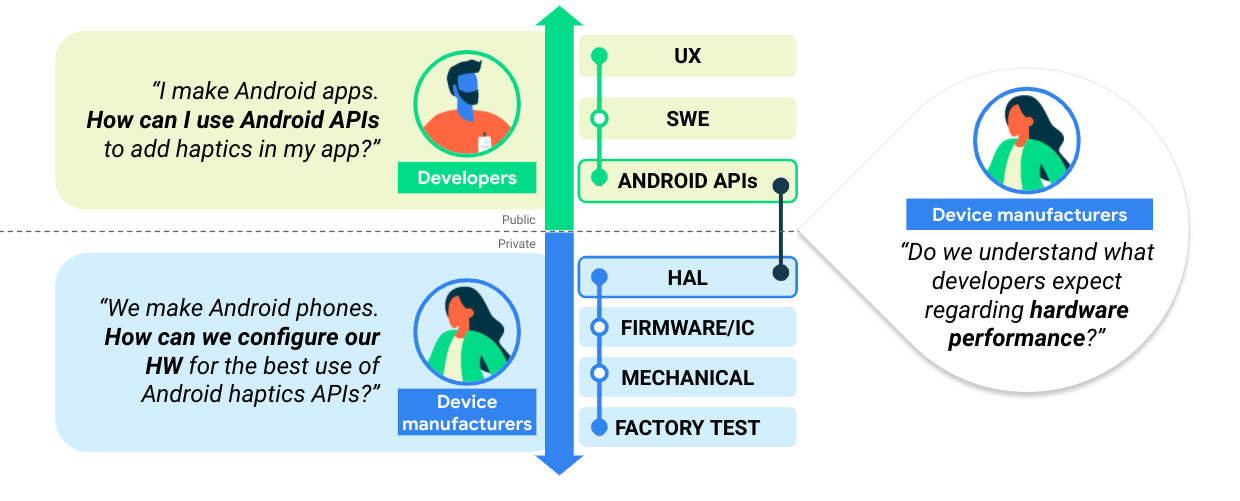
Рисунок 1. Налаживание обмена знаниями между производителями устройств и разработчиками.
Контрольный список для реализации тактильной обратной связи
- Список констант для реализации тактильной обратной связи.
- Рекомендации по реализации примитивов композиции HAL.
Сопоставление констант между HAL и API
- Рекомендации по сопоставлению между константами общедоступного API (именованными заполнителями в рамках фреймворка) и константами HAL, которые реализуют эти заполнители.
- Для получения более подробной информации об этом процессе ознакомьтесь с принципами проектирования, которые помогут вам в выборе рекомендуемого способа сопоставления данных .
Реализация эффектов кусочно-линейной огибающей (PWLE).
- Рекомендации по реализации для амплитудных и частотных огибающих.
Оцените аппаратное обеспечение.
- Инструкции по настройке тактильных эффектов. Используйте эти инструкции для быстрой проверки вашего оборудования.