
Gerätehersteller gelten im Allgemeinen als Eigentümer der privaten Assets, die für jedes Gerät erstellt werden. Daher konzentrieren sich ihre technischen Bemühungen oft auf eine pro Gerät-Basis. Die Konsistenz anderer Geräte im Ökosystem wird nur wenig oder gar nicht berücksichtigt.
Im direkten Gegensatz dazu versuchen Entwickler, Apps zu entwickeln, die auf allen Android-Smartphones im Ökosystem funktionieren, unabhängig von den technischen Spezifikationen des jeweiligen Geräts. Dieser Unterschied im Ansatz kann zu einem Fragmentierungsproblem führen. Beispielsweise entsprechen die Hardwarefunktionen bestimmter Smartphones nicht den Erwartungen der App-Entwickler. Wenn die Haptik-APIs also auf einigen Android-Smartphones funktionieren, auf anderen jedoch nicht, führt dies zu einem inkonsistenten Ökosystem. Aus diesem Grund spielt die Hardwarekonfiguration eine entscheidende Rolle, um sicherzustellen, dass Hersteller die Android-Haptik-APIs auf jedem Gerät implementieren können.
Auf dieser Seite finden Sie eine detaillierte Checkliste zum Einrichten der Hardwarekonformität für die optimale Nutzung der Android-Haptik-APIs.
Die folgende Abbildung veranschaulicht den Aufbau von gemeinsamem Wissen zwischen Geräteherstellern und Entwicklern, was ein entscheidender Schritt bei der Schaffung eines zusammenhängenden Ökosystems ist:
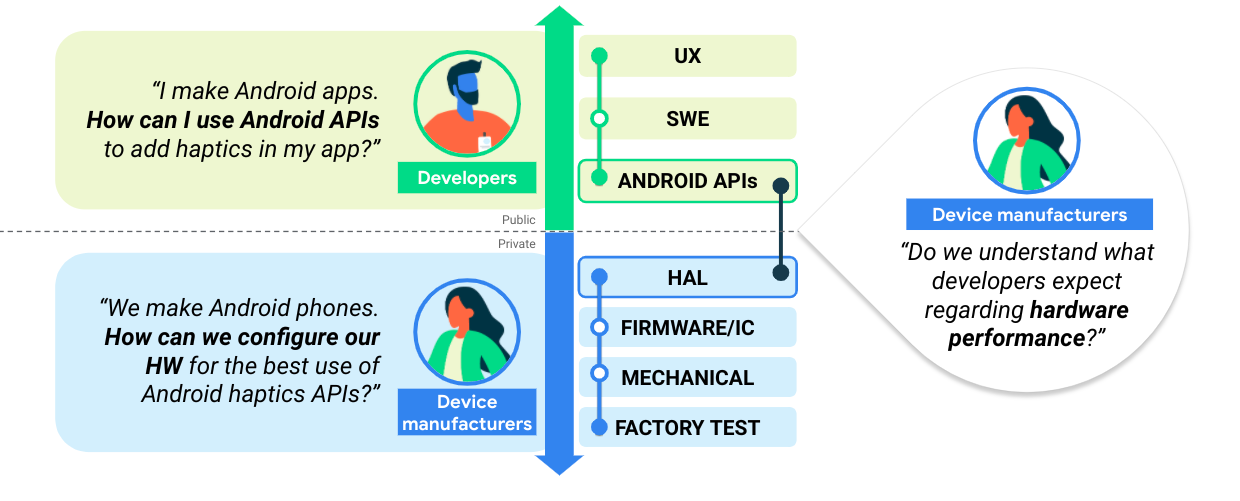
Abbildung 1 : Wissensaufbau zwischen Geräteherstellern und Entwicklern
Checkliste für die Haptik-Implementierung
-
- Liste der Konstanten zur Implementierung der Haptik.
-
- Implementierungsleitfaden für HAL-Kompositionsprimitive.
Konstanten zwischen HAL und API zuordnen
- Zuordnungsempfehlungen zwischen öffentlichen API-Konstanten (Platzhalter im Framework genannt) und HAL-Konstanten, die die Platzhalter implementieren.
- Weitere Informationen zu diesem Prozess finden Sie unter Designprinzipien zur Anleitung der empfohlenen Zuordnung.
Stückweise lineare Hüllkurveneffekte (Piecewise Linear Envelope, PWLE) implementieren
- Implementierungsleitfaden für Amplituden- und Frequenzhüllkurven.
-
- Anleitung zu Ziel-Haptikeffekten. Folgen Sie dieser Anleitung, um schnelle Prüfungen an Ihrer Hardware durchzuführen.