
使用成效表格中提供的資料,填入生態系統的成效地圖。填入成效地圖時,請按照建議的資料視覺化操作指南操作。將從 DUT 取得的資料與效能地圖對齊,以進行比較。
在成效地圖中以視覺化方式呈現資料
效果 1 和效果 2 的效能地圖是根據尖峰時間長度、尖峰振幅和清晰度品質因數 (FOMS = PRR / 尖峰時間長度) 繪製而成。將資料對齊效能地圖時,請仔細查看 x 軸 (尖峰持續時間)、y 軸 (尖峰振幅) 和泡泡大小 (FOMS) 中的資料。成效地圖會顯示多個類別,包括價格等級 (低、中、高) 和致動器類型 (X-LRA、Z-LRA、ERM)。使用不同顏色代表不同類別。
成效地圖會使用情境相對比較 (而非通過或失敗的判斷),協助評估目標裝置。解讀效能地圖與 DUT 測量結果的比較結果時,請根據手機所屬類別建立預期結果,然後思考下列問題:
- 地圖上顯示裝置效能特徵的位置為何?
- 考量多項條件 (例如價格等級或致動器類型) 後,您的裝置是否優於、等於或劣於競爭對手?
- 結果是否符合預期?如果不是,是哪個因素表現不佳?
舉例來說,如果預算型手機的 ERM 效能與高階 X-LRA 手機相當,則與其他 ERM 預算型手機相比,預算型手機的觸覺回饋品質相當出色。
在 EFFECT_CLICK (效果 1) 和 createOneShot (效果 2) 中,x 軸和 y 軸分別是指尖峰持續時間和尖峰振幅。氣泡大小代表清晰度的優值 (FOMS = PRR / 峰值持續時間),圖例中的顏色代碼則代表進一步區隔的類別 (價格層級或致動器類型)。舉例來說,在依價格層級 (例如低/中/高) 細分的成效地圖中,每個泡泡的顏色代表價格層級。只要將泡泡顏色與手機的價格層級相符,就能比較手機與相同價格層級的競爭對手。
圖 1 中的綠色氣泡顯示高品質觸覺回饋 (效果 1)。EFFECT_CLICK如果時間短、振幅高且泡泡大,效果通常會清晰有力。
圖 1 中的紅色氣泡顯示 EFFECT_CLICK 的觸覺回饋品質不佳 (效果 1)。如果時間長度較長、振幅較小且泡泡大小較小,通常會產生嗡嗡聲、糊狀感和微弱的感覺。
紅色虛線表示最小振幅門檻。如果震幅小於 0.1 g,使用者就無法感受到觸覺回饋 (失敗案例 F03-2)。

圖 1. 效果 1 的成效地圖使用指南
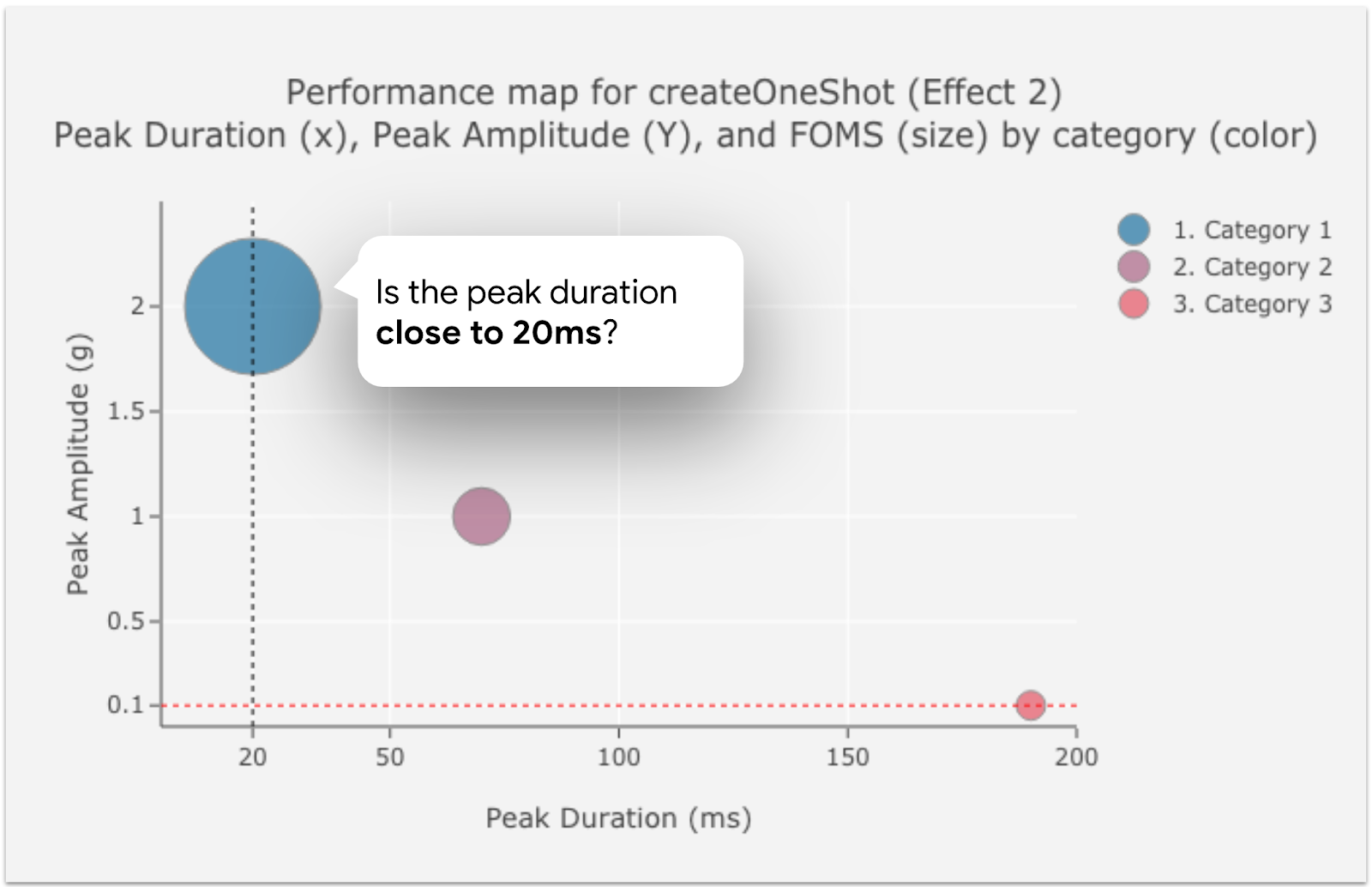
圖 2. Effect 2 學習指南的成效地圖
從 createOneShot (效果 2) 讀取資料的程序與效果 1 資料幾乎相同,但有一個例外。由於效果 2 的目標時間長度為 20 毫秒,因此接近 20 毫秒的峰值時間長度代表煞車效果良好的輸出。
createWaveform (效果 3) 的資料著重於振幅控制功能。第一個加速度 (加速度 1 = 50% 振幅 = 群組長條圖中的左側長條) 和第二個加速度 (加速度 2 = 100% 振幅 = 群組長條圖中的右側長條) 的目標比率為 2。

圖 3. Effect 3 學習地圖
成效地圖資料和插圖
這項資料適用於下列成效地圖:
- 測試日期:2020 年 4 月 12 日
- 測試的裝置型號數量:28
- 測試的裝置製造商數量:10
- 裝置發布期間:測試日期前最多 18 個月
效能地圖中觀察到的觸覺效果:
VibrationEffect.EFFECT_CLICK(效果 1)VibrationEffect.createOneShot(效果 2)VibrationEffect.createWaveform(效果 3)
價格層級區隔
- 高 (600 美元以上)
- 中等 (300 美元至 600 美元)
- 低 (最高 $300 美元)
失敗案例
- F01:未實作觸覺常數。沒有可供分析的訊號。
- F02:訊號振幅太弱,無法分析或供人感知。MATLAB 錯誤。
- F03-1:訊號振幅太弱,無法分析或供人感知。PRR 值小於零 (< 0)。
- F03-2:訊號振幅太弱,無法分析或供人感知。振幅值小於 0.1 (< 0.1)。
- F04:缺少第一階段的加速。上半場沒有訊號。
- F05:兩階段之間沒有加速。加速度 1 和加速度 2 的最大振幅幾乎相同。
硬體評估所需的 Android 版本:Android 10.0 (API 級別 29) 以上版本。
用於填入效能地圖的 Android 版本:Android 8.0 (API 級別 26) 以上版本。在導入觸覺回饋實作檢查清單之前,資料擷取作業是使用
HapticFeedbackConstants.KEYBOARD_PRESS執行的,因此效果 1 使用的是HapticFeedbackConstants.KEYBOARD_PRESS,而非VibrationEffect.EFFECT_CLICK。
EFFECT_CLICK (效果 1) 的成效地圖
| 關於 EFFECT_CLICK (效果 1) 的成效地圖 | |||||||
|---|---|---|---|---|---|---|---|
| 效果定義 (Java) | Vibrator vibrator = getSystemService(Vibrator.class); vibrator.vibrate(VibrationEffect.createPredefined(EFFECT_CLICK)); |
||||||
| 效果定義 (Kotlin) | val vibrator = getSystemService(Vibrator::class.java) vibrator.vibrate(VibrationEffect.createPredefined(EFFECT_CLICK)) |
||||||
| 解讀成效地圖所需的資料 |
|
||||||
| 合格率 |
|
||||||
| 用來填入 EFFECT_CLICK (效果 1) 效能地圖的資料 | |||||||
|---|---|---|---|---|---|---|---|
| 裝置 ID | 價格層級 | 致動器類型 | 通過/未通過 | 尖峰時間 (毫秒) | 峰值振幅 (g) | PRR | FOMS |
| #101 | 高 | X-LRA | 通過 | 167.33 | 0.53 | 20.91 | 0.12 |
| #102 | 高 | X-LRA | 通過 | 20.63 | 1.07 | 20.09 | 0.97 |
| #103 | 高 | X-LRA | 通過 | 19.98 | 0.98 | 21.75 | 1.09 |
| #104 | 高 | X-LRA | 通過 | 22.67 | 1.16 | 20.02 | 0.88 |
| #105 | 高 | X-LRA | 通過 | 10.96 | 1.30 | 23.62 | 2.16 |
| #106 | 高 | Z-LRA | 通過 | 20.13 | 1.11 | 24.15 | 1.20 |
| #107 | 高 | Z-LRA | 通過 | 49.31 | 0.79 | 20.06 | 0.41 |
| #108 | 高 | X-LRA | 通過 | 120.71 | 0.24 | 14.93 | 0.12 |
| #109 | 高 | Z-LRA | 通過 | 51.46 | 0.43 | 8.69 | 0.17 |
| #110 | 高 | X-LRA | 通過 | 8.44 | 1.01 | 27.68 | 3.28 |
| #111 | 高 | ERM | 失敗 (F01) | 不適用 | 不適用 | 不適用 | 不適用 |
| #112 | 高 | Z-LRA | 通過 | 25.85 | 0.51 | 21.94 | 0.85 |
| #113 | 高 | Z-LRA | 通過 | 58.35 | 0.29 | 25.10 | 0.43 |
| #114 | 高 | Z-LRA | 通過 | 34.46 | 0.28 | 20.91 | 0.61 |
| #115 | 高 | Z-LRA | 通過 | 23.67 | 0.31 | 26.46 | 1.12 |
| #116 | 高 | X-LRA | 通過 | 8.40 | 0.44 | 29.82 | 3.55 |
| #117 | 高 | Z-LRA | 通過 | 31.35 | 1.13 | 23.65 | 0.75 |
| #118 | 中 | Z-LRA | 通過 | 26.42 | 0.42 | 25.05 | 0.95 |
| #119 | 中 | Z-LRA | 通過 | 30.65 | 0.48 | 19.69 | 0.64 |
| #120 | 中 | Z-LRA | 通過 | 170.65 | 0.97 | 20.16 | 0.12 |
| #121 | 中 | Z-LRA | 通過 | 51.69 | 0.55 | 17.14 | 0.33 |
| #122 | 中 | X-LRA | 失敗 (F01) | 不適用 | 不適用 | 不適用 | 不適用 |
| #123 | 低 | ERM | 失敗 (F01) | 不適用 | 不適用 | 不適用 | 不適用 |
| #124 | 低 | ERM | 通過 | 68.33 | 0.93 | 7.40 | 0.11 |
| #125 | 低 | ERM | 失敗 (F01) | 不適用 | 不適用 | 不適用 | 不適用 |
| #126 | 低 | Z-LRA | 通過 | 41.96 | 0.68 | 8.77 | 0.21 |
| #127 | 低 | Z-LRA | 通過 | 9.63 | 0.43 | 4.55 | 0.47 |
| #128 | 低 | Z-LRA | 通過 | 22.77 | 0.55 | 26.10 | 1.15 |

圖 4. 效果 1 的成效地圖 (依價格層級)

圖 5. 效果 1 的效能地圖 (依致動器類型)
createOneShot 的成效地圖 (Effect 2)
| 關於 createOneShot 的成效地圖 (效果 2) | |||||||
|---|---|---|---|---|---|---|---|
| 效果定義 (Java) | private static final long oneShotTiming = 20; private static final int oneShotAmplitude = 255; |
||||||
| 效果定義 (Kotlin) | private val oneShotTiming: Long = 20 private val oneShotAmplitude = 255 |
||||||
| 解讀成效地圖所需的資料 |
|
||||||
| 合格率 |
|
||||||
| 用於填入 createOneShot 成效表格的資料 (Effect 2) | |||||||
|---|---|---|---|---|---|---|---|
| 裝置 ID | 價格層級 | 致動器類型 | 通過/未通過 | 尖峰時間 (毫秒) | 峰值振幅 (g) | PRR | FOMS |
| #201 | 高 | X-LRA | 通過 | 168.81 | 0.98 | 20.62 | 0.12 |
| #202 | 高 | X-LRA | 通過 | 28.35 | 2.29 | 28.95 | 1.02 |
| #203 | 高 | X-LRA | 通過 | 77.25 | 0.78 | 21.01 | 0.27 |
| #204 | 高 | X-LRA | 通過 | 70.48 | 1.42 | 21.85 | 0.31 |
| #205 | 高 | X-LRA | 通過 | 67.92 | 1.19 | 22.61 | 0.33 |
| #206 | 高 | Z-LRA | 通過 | 33.44 | 1.34 | 25.19 | 0.75 |
| #207 | 高 | Z-LRA | 通過 | 73.90 | 1.36 | 23.13 | 0.31 |
| #208 | 高 | X-LRA | 通過 | 102.02 | 0.71 | 20.12 | 0.20 |
| #209 | 高 | Z-LRA | 通過 | 63.71 | 0.14 | 3.70 | 0.06 |
| #210 | 高 | X-LRA | 通過 | 8.46 | 1.01 | 28.77 | 3.40 |
| #211 | 高 | ERM | 失敗 (F02、F03-1) | 不適用 | 不適用 | 不適用 | 不適用 |
| #212 | 高 | Z-LRA | 通過 | 43.71 | 1.03 | 23.14 | 0.53 |
| #213 | 高 | Z-LRA | 通過 | 27.42 | 0.23 | 22.85 | 0.83 |
| #214 | 高 | Z-LRA | 通過 | 45.29 | 0.72 | 19.99 | 0.44 |
| #215 | 高 | Z-LRA | 通過 | 23.71 | 0.41 | 27.30 | 1.15 |
| #216 | 高 | X-LRA | 通過 | 8.31 | 0.43 | 27.58 | 3.32 |
| #217 | 高 | Z-LRA | 通過 | 42.19 | 1.03 | 26.97 | 0.64 |
| #218 | 中 | Z-LRA | 通過 | 26.38 | 0.42 | 24.74 | 0.94 |
| #219 | 中 | Z-LRA | 通過 | 46.77 | 1.01 | 24.64 | 0.53 |
| #220 | 中 | Z-LRA | 通過 | 166.33 | 0.97 | 20.61 | 0.12 |
| #221 | 中 | Z-LRA | 通過 | 38.60 | 0.42 | 18.21 | 0.47 |
| #222 | 中 | X-LRA | 通過 | 76.00 | 0.61 | 23.17 | 0.30 |
| #223 | 低 | ERM | 失敗 (F03-2) | 55.27 | 0.08 | 1.95 | 0.04 |
| #224 | 低 | ERM | 通過 | 39.29 | 0.30 | 7.04 | 0.18 |
| #225 | 低 | ERM | 失敗 (F03) | 不適用 | 不適用 | 不適用 | 不適用 |
| #226 | 低 | Z-LRA | 通過 | 34.31 | 0.53 | 30.23 | 0.88 |
| #227 | 低 | Z-LRA | 通過 | 5.42 | 0.37 | 12.23 | 2.26 |
| #228 | 低 | Z-LRA | 通過 | 22.65 | 0.90 | 24.23 | 1.07 |

圖 6. 特效 2 的成效地圖 (依價格層級)

圖 7. 效果 2 的效能地圖 (依致動器類型)
createWaveform 的效能地圖 (效果 3)
| 關於 createWaveform (Effect 3) 的效能地圖 | |||||||
|---|---|---|---|---|---|---|---|
| 效果定義 (Java) |
private static final long[] waveformTimings = {500, 500};
private static final int[] waveformAmplitudes = {128, 255};
|
||||||
| 效果定義 (Kotlin) | private val waveformTimings = longArrayOf(500, 500) private val waveformAmplitudes = intArrayOf(128, 255) |
||||||
| 解讀成效地圖所需的資料 |
|
||||||
| 合格率 |
|
||||||
| 用於填入 createWaveform (Effect 3) 成效表格的資料 | |||||||
|---|---|---|---|---|---|---|---|
| 裝置 ID | 價格層級 | 致動器類型 | 通過/未通過 | 加速 1 (50%) | 加速 2 (100%) | 加速比 | Delta |
| #301 | 高 | X-LRA | 通過 | 1.19 | 2.02 | 1.70 | 0.83 |
| #302 | 高 | X-LRA | 通過 | 0.87 | 1.85 | 2.12 | 0.98 |
| #303 | 高 | X-LRA | 通過 | 0.62 | 1.47 | 2.37 | 0.85 |
| #304 | 高 | X-LRA | 通過 | 0.82 | 1.89 | 2.30 | 1.07 |
| #305 | 高 | X-LRA | 通過 | 美元 | 1.51 | 2.21 | 0.83 |
| #306 | 高 | Z-LRA | 通過 | 1.02 | 1.50 | 1.46 | 0.47 |
| #307 | 高 | X-LRA | 通過 | 0.59 | 1.37 | 2.32 | 0.78 |
| #308 | 高 | Z-LRA | 通過 | 0.58 | 0.72 | 1.25 | 0.14 |
| #309 | 中 | Z-LRA | 通過 | 0.39 | 1.43 | 3.66 | 1.04 |
| #310 | 高 | X-LRA | 失敗 (F04) | 0.00 | 1.36 | 1.36 | 1.36 |
| #311 | 高 | X-LRA | 失敗 (F04) | 0.00 | 0.56 | 0.56 | 0.56 |
| #312 | 中 | Z-LRA | 失敗 (F04) | 0.00 | 0.71 | 0.71 | 0.71 |
| #313 | 高 | Z-LRA | 失敗 (F05) | 0.60 | 0.61 | 1.02 | 0.01 |
| #314 | 高 | Z-LRA | 失敗 (F05) | 0.64 | 0.65 | 1.01 | 0.01 |
| #315 | 高 | ERM | 失敗 (F05) | 0.96 | 0.95 | 0.99 | -0.01 |
| #316 | 高 | Z-LRA | 失敗 (F05) | 0.40 | 0.40 | 1.00 | 0.00 |
| #317 | 高 | Z-LRA | 失敗 (F05) | 0.60 | 0.58 | 0.98 | -0.01 |
| #318 | 高 | Z-LRA | 失敗 (F05) | 0.30 | 0.30 | 1.00 | 0.00 |
| #319 | 高 | Z-LRA | 失敗 (F05) | 0.57 | 0.56 | 0.99 | 0.00 |
| #320 | 中 | Z-LRA | 失敗 (F05) | 0.67 | 0.67 | 1.00 | 0.00 |
| #321 | 中 | Z-LRA | 失敗 (F05) | 0.67 | 0.66 | 0.99 | -0.01 |
| #322 | 中 | X-LRA | 失敗 (F05) | 0.95 | 1.02 | 1.07 | 0.06 |
| #323 | 低 | ERM | 失敗 (F05) | 0.86 | 0.88 | 1.01 | 0.01 |
| #324 | 低 | ERM | 失敗 (F05) | 1.46 | 1.45 | 0.99 | -0.01 |
| #325 | 低 | ERM | 失敗 (F05) | 0.95 | 0.96 | 1.01 | 0.01 |
| #326 | 低 | Z-LRA | 失敗 (F05) | 0.90 | 0.92 | 1.02 | 0.02 |
| #327 | 低 | Z-LRA | 失敗 (F05) | 0.47 | 0.47 | 1.00 | 0.00 |
| #328 | 低 | Z-LRA | 失敗 (F05) | 0.51 | 0.56 | 1.09 | 0.04 |
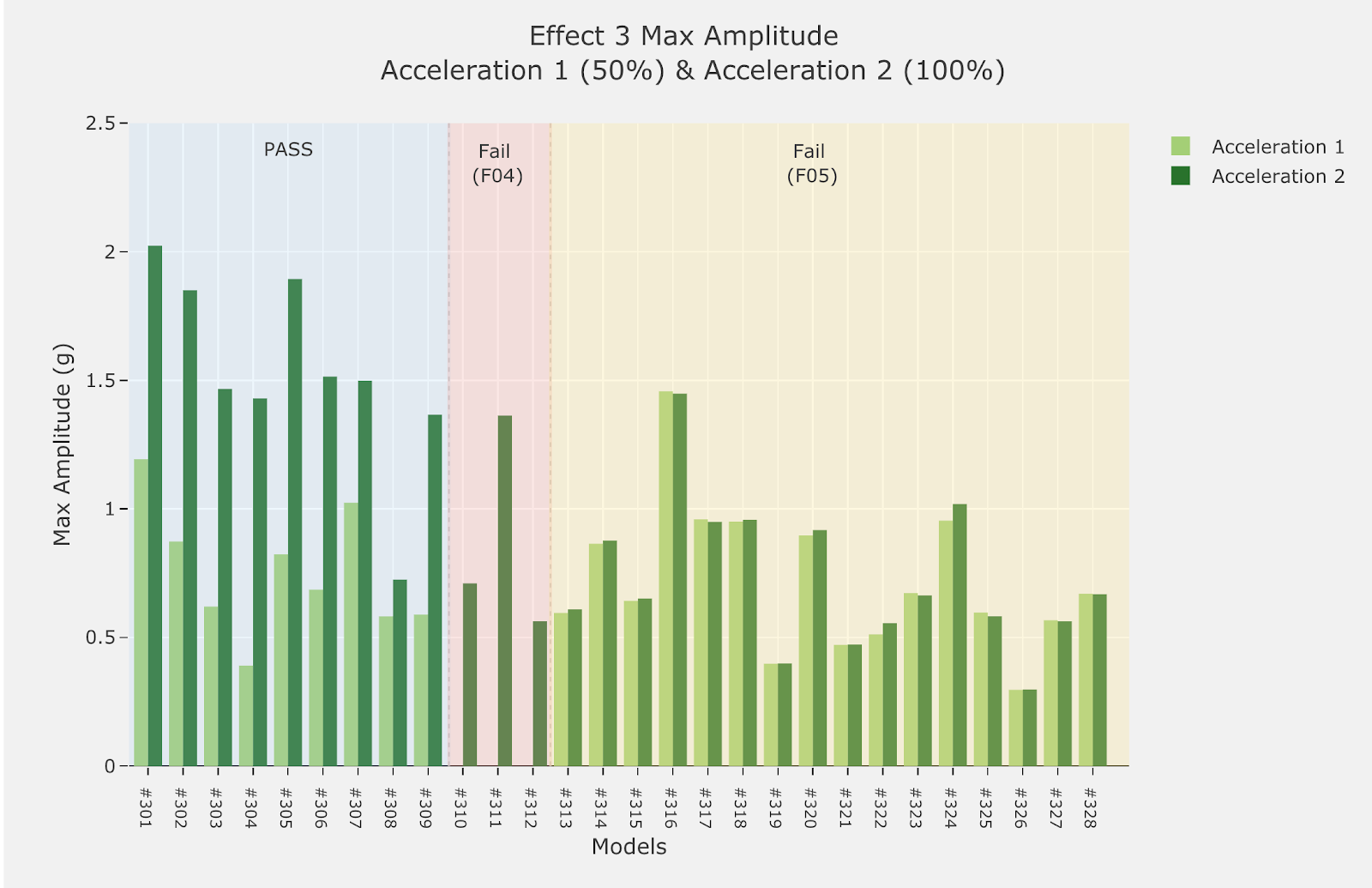
圖 8. Effect 3 的成效地圖 (依通過/失敗)