
Cette page explique comment acheter ou assembler une Sensor Fusion Box. La Sensor Fusion Box est utilisée dans le test sensor_fusion de CameraITS et dans le test de synchronisation multi-camera. Elle fournit un environnement de test cohérent pour mesurer la précision des codes temporels des capteurs des appareils Android, en particulier les capteurs d'image de l'appareil photo et les gyroscopes. Elle se compose de composants de boîte en plastique découpés au laser à partir de dessins de conception assistée par ordinateur (CAO) et d'un boîtier de commande de servomoteur.
Vous pouvez acheter une Sensor Fusion Box ou la fabriquer vous-même.
Acheter une Sensor Fusion Box
Nous vous recommandons d'acheter une Sensor Fusion Box auprès de l'un des fournisseurs qualifiés suivants.
Byte Bridge Inc.
USA: 1502 Crocker Ave, Hayward, CA 94544-7037
China: 22F #06-08, Hongwell International Plaza Tower A, 1600 West Zhongshan Road, Xuhui, Shanghai, 200235
www.bytebt.com
androidpartner@bytebt.com
USA: +1-510-373-8899
China: +86-400-8866-490JFT CO LTD 捷富通科技有限公司 (previously known as MYWAY DESIGN)
China: No. 40, Lane 22, Heai Road, Wujing Town, Minhang District, Shanghai, China
Taiwan: 4F., No. 163, Fu-Ying Road, XinZhuang District, New Taipei City 242, Taiwan
www.jftcoltd.com
service@jfttec.com or its.sales@jfttec.com
China:+86-021-64909136
Taiwan: 886-2-29089060
Fabriquer une Sensor Fusion Box
Cette section fournit des instructions détaillées pour assembler une Sensor Fusion Box à partir de composants en acrylonitrile butadiène styrène (ABS) découpés au laser (illustrés dans la figure 1).

Figure 1. Dessin mécanique des composants de la Sensor Fusion Box
Outils requis
Avant de commencer, assurez-vous d'avoir téléchargé les dessins techniques de la Sensor Fusion Box (inclus dans le fichier ZIP de la Sensor Fusion Box) et de disposer des outils suivants :
- Tournevis cruciforme
- Tournevis à tête JIS
- Clés hexagonales
- Kit de perceuse électrique
- Cutter X-ACTO
- Ruban adhésif
Étape 1 : Appliquez des autocollants en vinyle
Après avoir créé les composants en ABS avec un découpeur laser, appliquez des autocollants en vinyle sur la boîte en plastique pour obtenir le contrôle des couleurs approprié à l'intérieur de la boîte de test :
Appliquez du vinyle sur le côté lisse de l'ABS, comme illustré dans la figure 2. Pour obtenir des conseils utiles sur l'application de vinyle, consultez wikiHow.
Découpez les trous nécessaires sur le vinyle avec le cutter X-ACTO.

Figure 2. Pièces en ABS avec vinyle appliqué sur le côté lisse (intérieur de la boîte)À l'aide de colle acrylique, collez les pièces rondes en ABS sur les quatre coins du panneau inférieur.

Figure 3. Panneau inférieur avec des pièces rondes en ABS collées aux quatre coins
Étape 2 : Préparez le support de téléphone et fixez le support de servomoteur
Pour préparer le support de téléphone à fixer au servomoteur :
Percez 20 trous sur le support de téléphone avec un foret de 1/4"-20.

Figure 4. Support de téléphone avec trous taraudésAssurez-vous d'avoir les découpes en ABS, les vis moletées en nylon, les écrous en nylon (pour ajuster la hauteur des vis si nécessaire), le bras de servomoteur double actobotics à cannelures C1, les vis 4-40 et les ressorts de compression.

Figure 5. Pièces du support de téléphoneAppliquez les vis 4-40 et serrez (1,2 N*m ou 8,9 in*lbf) le bras de servomoteur à l'arrière du support de téléphone. À l'aide des mêmes vis et des écrous borgnes 4-40, serrez la découpe en ABS du séparateur de téléphone sur la face avant du support de téléphone.

Figure 6. Arbre à l'arrière du dispositif, serré par des vis appliquées à l'avant
Figure 7. Vis 4-40 de 3/4" de long et écrous borgnes 4-40
Figure 8. Arrière (à gauche) et avant (à droite) du support de téléphone
Étape 3 : Fixez les pinces de téléphone
Pour fixer les pinces de téléphone :
Coupez la feuille de néoprène en fonction de la forme des pinces découpées en ABS, mais laissez un pouce de moins à chaque extrémité, comme illustré dans la figure 9. Après avoir coupé la feuille de néoprène en conséquence, appliquez les pièces sur les pinces découpées en ABS, comme dans la figure 8.

Figure 9. Pince en ABS avec feuille de néoprène appliquéeFixez les vis moletées en nylon et le fil de ressort à la pince. Ajoutez des écrous en nylon pour réduire la longueur des vis, si nécessaire.

Figure 10. Pince avec feuille de néoprène, vis moletées, écrous en nylon et fil de ressortVissez les vis moletées des pinces de téléphone dans les trous taraudés du support de téléphone, comme illustré dans la figure 11. Vous pouvez ajuster l'emplacement des supports de téléphone en fonction de la taille des téléphones.

Figure 11. Dessin mécanique du support de téléphone
Figure 12. Support de téléphone assemblé
Étape 4 : Assemblez le rail de la porte coulissante
Fixez les rails du panneau coulissant en haut et en bas de la boîte, vers l'avant. La figure 13 montre des vis 6-32 sur des trous pré-taraudés. Vous pouvez également utiliser des vis autotaraudeuses.

Figure 13. Rail fixe du panneau coulissant en haut et en bas de la boîte
Étape 5 : Fixez l'éclairage
Pour fixer les supports d'éclairage et le diffuseur :
Empilez deux pièces de poignée l'une sur l'autre et assemblez-les à l'aide de vis 6-32 (ou utilisez des vis autotaraudeuses).

Figure 14. Pièces de poignée et assemblage de la Sensor Fusion BoxPréparez quatre vis 4-40, des écrous et des écrous borgnes pour fixer le support de fixation du kit d'éclairage au mur de la boîte.
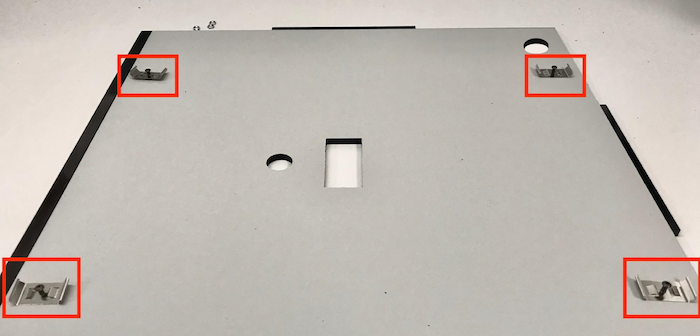
Figure 15. Vis 4-40 et support d'éclairage sur la paroi intérieure de la boîte
Figure 16. Boulons et écrous borgnes appliqués aux vis depuis l'extérieur de la boîteCoupez le diffuseur de lumière à une taille appropriée pour envelopper les bandes lumineuses (non requis si les lumières sont fournies avec le diffuseur).

Figure 17. Bandes lumineuses et diffuseurs de lumièreEnroulez le diffuseur de lumière autour de la bande et fixez-le à l'arrière avec du ruban adhésif.

Figure 18. Bandes lumineuses et diffuseurs de lumière fixés à l'arrière avec du ruban adhésifEnclenchez les lumières dans les supports (elles peuvent être difficiles à insérer).
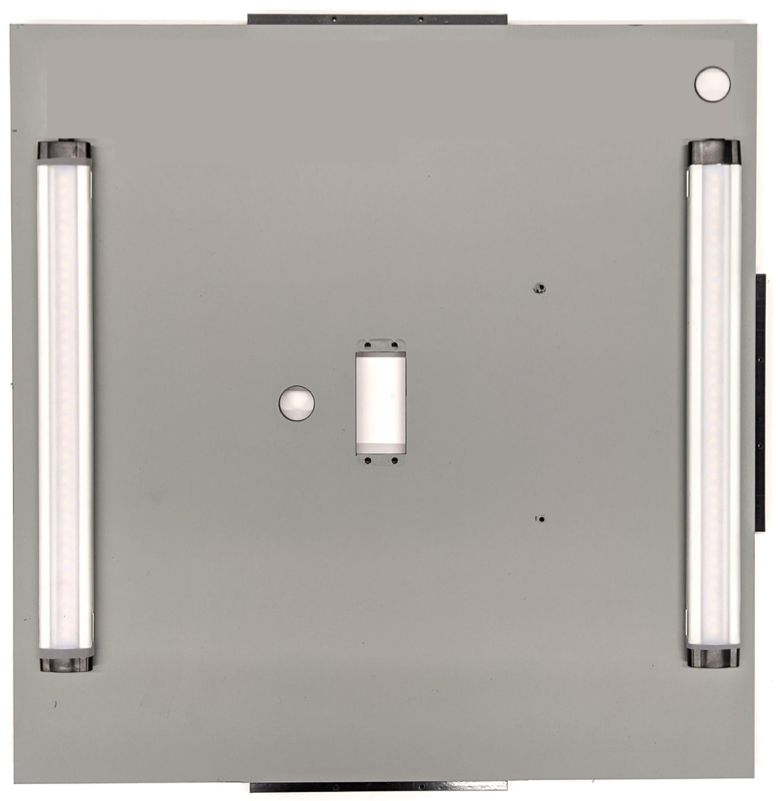
Figure 19. Lumières montées sur des supports
Étape 6 : Fixez le support de téléphone à la plaque de servomoteur
Pour fixer le support de téléphone à la plaque de servomoteur :
Préparez quatre vis 6-32 et une plaque de servomoteur pour fixer le servomoteur au mur. Fixez le servomoteur sur la paroi intérieure et insérez les vis de l'intérieur dans la plaque de servomoteur sur la paroi extérieure.

Figure 20. Servomoteur et plaque de servomoteur maintenus en place par des vis 6-32Fixez le support de téléphone sur le servomoteur à l'aide d'écrous Nylstop (en poussant le centre de l'arbre dans le centre de rotation du servomoteur).

Figure 21. Engrenage du servomoteur
À l'aide de la vis de servomoteur fournie avec le servomoteur, vissez (1,2 N*m ou 8,9 in*lbf) le support de téléphone sur l'engrenage du servomoteur à travers le bras de servomoteur.

Figure 22. Bras de servomoteur
Étape 7 : Assemblage final
Pour terminer l'assemblage de la Sensor Fusion Box :
À partir d'Android 13, le banc d'essai de fusion de capteurs est fourni avec le contrôleur d'éclairage Arduino pour Android 13. (Sous Android 12 ou version antérieure, le banc d'essai de fusion de capteurs était fourni avec un contrôleur Arduino à 6 canaux ou un contrôleur Canakit. Les appareils équipés d'Android 11 à Android 12 sont compatibles avec le contrôleur Android 13, le contrôleur Arduino à 6 canaux ou le contrôleur Canakit.) Connectez l'extension de servomoteur à n'importe quel canal du contrôleur de servomoteur, où GND correspond au fil noir, VCC au fil rouge et SIG au fil jaune.

Figure 23. Contrôleur d'éclairage Arduino Rev3
Figure 24. Exemple de connexion du contrôleur d'éclairage Arduino Rev3Fixez la boîte avec du ruban adhésif, puis vissez les pièces ensemble (vous devrez peut-être pré-percer des trous dans certaines pièces).

Figure 25. Banc d'essai de fusion de capteurs fixé avec du ruban adhésif
Pour Android 15 ou version ultérieure, demandez à votre imprimerie locale d'imprimer le fichier checkerboard.pdf (inclus dans le répertoire
test/sensor_fusionde la base de code) sur du papier de 18 x 18 pouces avec le motif en damier de la largeur du papier, puis fixez le graphique au mur en face du support de téléphone.Pour les appareils photo avec des champs de vision plus petits, tels que les téléobjectifs, demandez à votre imprimerie locale de créer des versions proportionnellement mises à l'échelle du damier. (Par exemple, un graphique mis à l'échelle à 50% serait imprimé sur du papier de 9 x 9 pouces.)

Figure 26. Graphique en damier pour Android 15 ou version ultérieure
Assurez-vous que le point rouge au centre du damier est directement face à l'appareil photo lorsqu'il est placé sur le support, comme illustré dans la figure 27.

Figure 27. Damier imprimé et fixé au mur opposé au support de téléphone