
این صفحه نحوه مونتاژ کنترلر Android 13 را توضیح می دهد که حرکت را برای دستگاه تست همجوشی سنسور و روشنایی ITS-in-a-box را کنترل می کند. تست همجوشی حسگر بخشی از مجموعه تست تصویر دوربین (Camera ITS) در مجموعه تست سازگاری (CTS) است. کنترلر Android 13 با کنترل روشنایی دکل و موتور سروو برای آزمایش صحنه هایی که نیاز به چرخش و کنترل نور دارند، اتوماسیون را فعال می کند.
نمای کلی کنترلر اندروید 13
ITS-in-a-box یک محیط تست ثابت با فاصله ثابت بین تبلت آزمایشی و تلفن آزمایشی، علاوه بر روشنایی ثابت بدون منبع نور خارجی، فراهم میکند. کنترلر Android 13 هم کنترل سروو و هم کنترل نور را خودکار می کند و نیازی به چرخش دستی DUT برای آزمایش صحنه همجوشی سنسور و روشن و خاموش کردن دستی چراغ ها برای آزمایش های کنترل شده با نور را از بین می برد.
کنترل سروو و روشنایی در دستگاه های آزمایشی
دستگاه تست فیوژن سنسور یک حرکت ثابت تلفن را برای آزمایش تکرارپذیر فراهم می کند. این تلفن در مقابل یک هدف شطرنجی چرخانده می شود تا امکان ثبت تصویر با تلفن در موقعیت های مختلف را فراهم کند. برای test_sensor_fusion ، سروو گوشی را در حدود 2 ثانیه به دور مرکز دوربین محور 90 درجه میچرخاند و به عقب برمیگردد. برای test_video_stabilization ، سروو تلفن را بهطور مکرر به دور مرکز دوربین محور 10 درجه به عقب میچرخاند تا در هنگام راه رفتن، حرکت تلفن را شبیهسازی کند. شکل 1 دو گوشی را نشان می دهد که در یک دستگاه تست همجوشی سنسور حرکت می کنند. شکل 2 یک تلفن را نشان می دهد که در یک دستگاه تست همجوشی سنسور حرکت می کند.
شکل 1. حرکت تلفن در دستگاه تست برای test_sensor_fusion

شکل 2. حرکت تلفن در دستگاه تست برای تثبیت_تست_ویدئو
کنترل سروو موتور
سروو موتورهای آنالوگ در دستگاه تست، سرووهای موقعیتی هستند که با استفاده از مدولاسیون عرض پالس (PWM) کنترل می شوند. یک نمونه کنترل موقعیت معمولی در شکل 3 نشان داده شده است. سیگنال کنترل دارای دوره 20 میلی ثانیه است. با تغییر عرض پالس به حداقل عرض، موتور به حالت خنثی و با تغییر عرض پالس به حداکثر عرض، موتور 180 درجه در جهت عقربه های ساعت حرکت می کند.
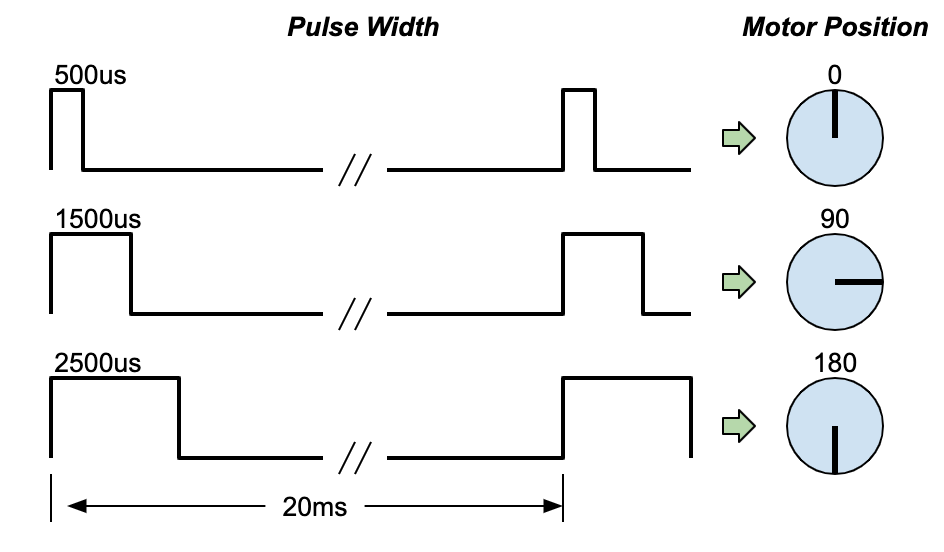
شکل 3. توصیف معمولی کنترل سروو
کنترل روشنایی
برای کنترل حرکت سروو موتور و چراغ ها با استفاده از رایانه میزبان، دستگاه تست فیوژن سنسور به اتصال USB نیاز دارد. کنترلر Android 13 از یک برد Arduino UNO R3 متصل به USB استفاده می کند که یک برد مسیریابی سفارشی (یا شیلد ) در بالا نصب شده است. کنترلکننده Android 13 میتواند تا سه سروو روتاتور فیوژن فیوژن سنسور و حداکثر سه سیستم روشنایی ITS-in-a-box یا یک دکل فیوژن سنسور را از یک کامپیوتر میزبان کنترل کند.
کنترلر نسخه 3.0 اندروید 13 به کاربران این امکان را می دهد که وقتی پورت سریال آردوینو از طریق USB باز می شود، تنظیم مجدد خودکار را غیرفعال کنند. عملکرد تنظیم مجدد خودکار زمانی فعال می شود که کنترلر به میزبان دیگری وصل شود یا برای موارد آزمایشی دیگر استفاده شود. کاربران می توانند با استفاده از یک سوئیچ فیزیکی روی کنترلر، تنظیم مجدد خودکار را فعال یا غیرفعال کنند.
کنترلر Android 13 می تواند با هر دوربین ITS-in-a-box کار کند. کنترلر اندروید 13 را می توان به هر دوربین ITS-in-a-box (RFoV، WFoV، مدولار) یا جعبه سنسور فیوژن برای انجام تست های کنترل شده با نور متصل کرد. از اندروید 15، تمام تستهای کنترلشده با نور در scene_flash گنجانده شدهاند و میتوانند با استفاده از جعبه فیوژن سنسور اجرا شوند، به جز scene_low_light ، که برای نمایش نمودار به تبلت نیاز دارد و باید با استفاده از Camera ITS-in-a-box اجرا شود.
برای تستهای صحنه_فلش و صحنه_کم_نور ، یک محیط تاریک با چراغهای خاموش برای فعال کردن عملکرد فلاش خودکار در تلفنهای آزمایشی لازم است. شکل 4 چراغ های ITS-in-a-box را نشان می دهد که توسط کنترلر اندروید 13 خاموش و روشن می شوند.
شکل 4. چراغ ها برای test_auto_flash خاموش و روشن می شوند
تاریخچه تجدید نظر
جدول زیر تاریخچه ویرایش کنترلر اندروید 13 را شرح می دهد و شامل لینک های دانلود هر نسخه از فایل های تولیدی است.
| تاریخ | تجدید نظر | دانلود فایل تولیدی | تغییر گزارش |
|---|---|---|---|
| آگوست 2024 | 3.0 |
| |
| دسامبر 2022 | 2.2 |
| |
| مارس 2022 | 1 |
|
راه اندازی کنترلر اندروید 13
در این بخش نحوه تنظیم یک کنترلر اندروید 13 توضیح داده شده است.
اجزای مورد نیاز
می توانید کنترلر Android 13 را از طریق یکی از فروشندگان واجد شرایط ما خریداری کنید یا می توانید کنترلر را خودتان بسازید. فایل تولیدی شامل یک فایل PCB Gerber، صورتحساب PCB مواد (BOM)، اطلاعات جایگذاری PCB و یک فایل STEP محصور است. برای دانلود فایل تولیدی به جدول در Revision history مراجعه کنید.
اگر در حال ساخت کنترلر خود هستید، باید یک برد Arduino UNO R3 داشته باشید. در صورت خرید کنترلر از طریق فروشنده واجد شرایط، آردوینو نیز شامل می شود.
محفظه کنترلر Android 13 یک جزء اختیاری اما توصیه شده است که از کنترلر محافظت می کند و پورت های USB استفاده نشده را مسدود می کند تا از خطاهای راه اندازی جلوگیری کند. برای جزئیات در مورد قیمت و گزینه های کنترلر، با فروشنده واجد شرایط تماس بگیرید.
رویه راه اندازی
برای راه اندازی کنترلر Android 13، مراحل زیر را دنبال کنید:
آداپتورهای 12 ولت (برای روشنایی) و 5 ولت (برای سروو) را به جک های برق مناسب وصل کنید (شکل 5).
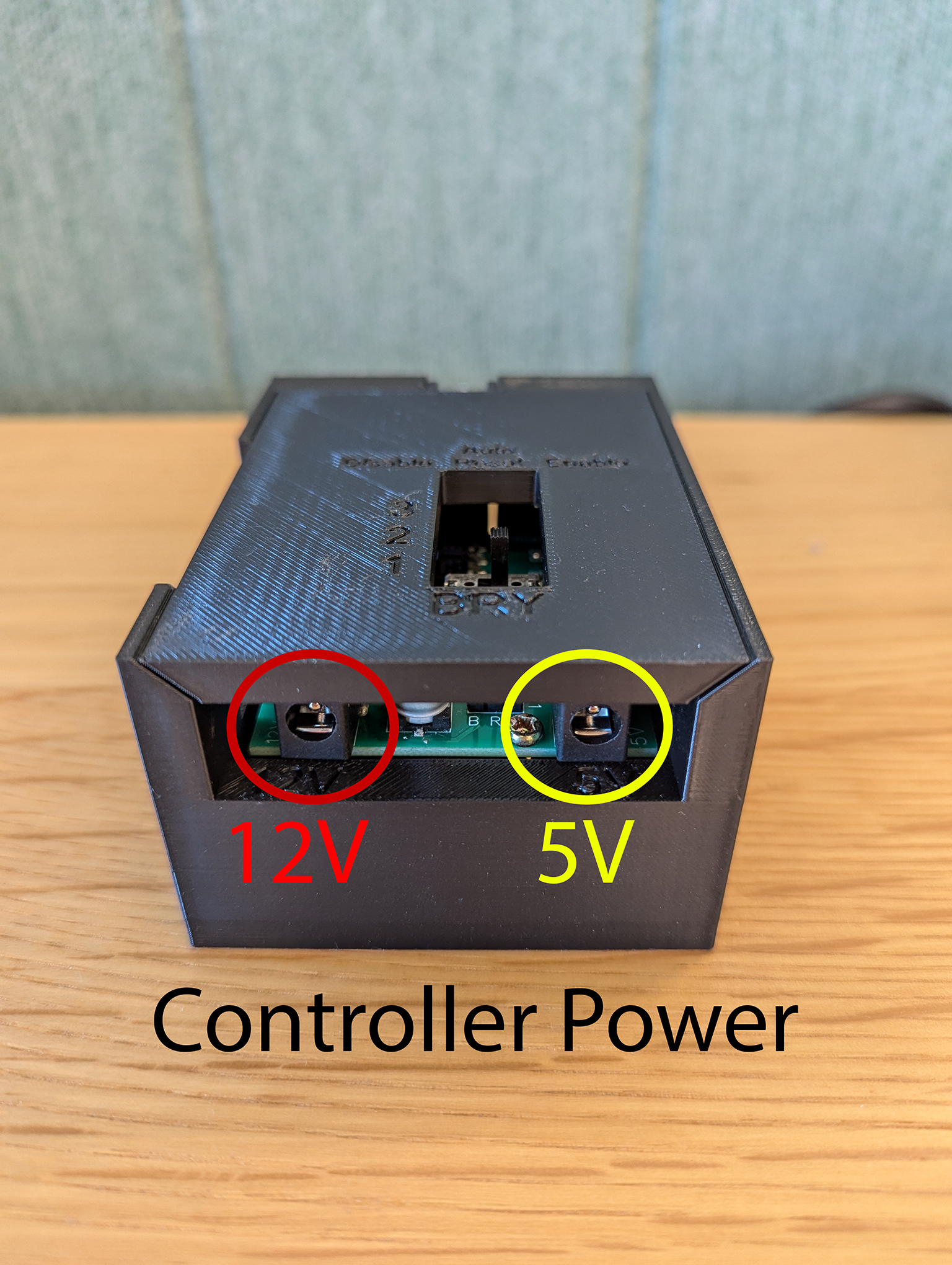
شکل 5. محل آداپتور برق
چراغهای ITS-in-a-box یا Sensor Fusion را به یکی از جکهای خروجی کانال روشنایی وصل کنید (شکل 6). بسته به استفاده از بشکه قدرت روشنایی، در صورت نیاز از آداپتور استفاده کنید (شکل 7).

شکل 6. محل خروجی کانال های روشنایی

شکل 7. آداپتور برق روشنایی را به کنترلر متصل می کند
برای تنظیم صحنه های sensor_fusion ، سروو را به یکی از هدرهای اتصال کانال سروو وصل کنید.

شکل 8. محل اتصال سروو
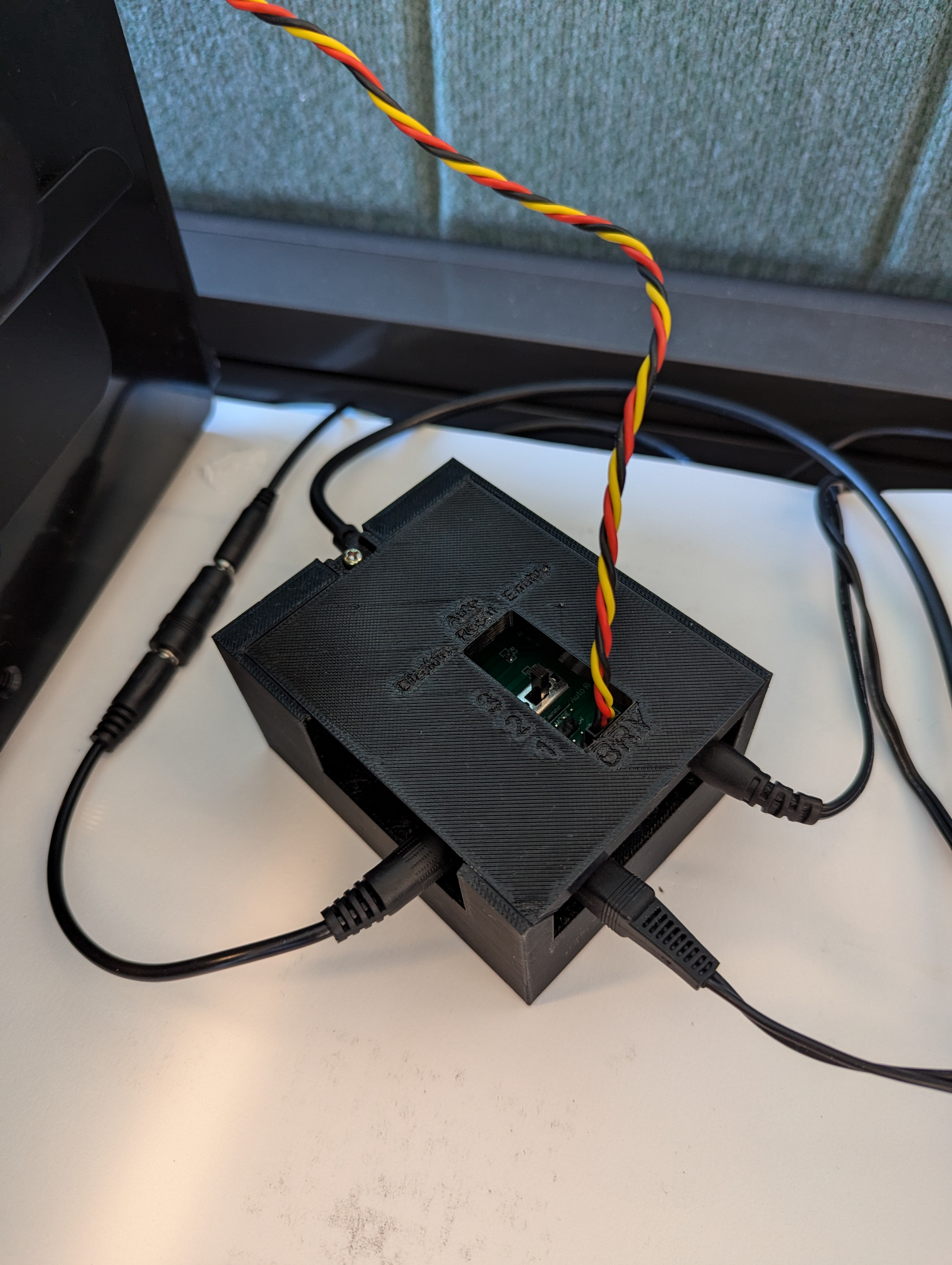
برای کنترلرهای نسخه 3.0، هنگام اتصال کنترلر به میزبان جدید، سوئیچ تنظیم مجدد خودکار باید روی
Enableتنظیم شود.برای ویرایش 3.0، کنترلر دارای یک سوئیچ تنظیم مجدد خودکار است که می تواند فعال یا غیرفعال شود. هنگام تست، توصیه میکنیم سوئیچ تنظیم مجدد خودکار را روی
Disableقرار دهید تا از خاموش شدن لحظهای همه چراغها در ابتدای هر آزمایش جلوگیری شود زیراits_base_testارتباط با کنترلکننده آردوینو برقرار میکند. این در هنگام اجرای آزمایش موازی (ITS همزمان با سیستم روشنایی دکل آزمایشی متصل به همان کنترلر) بسیار مهم است.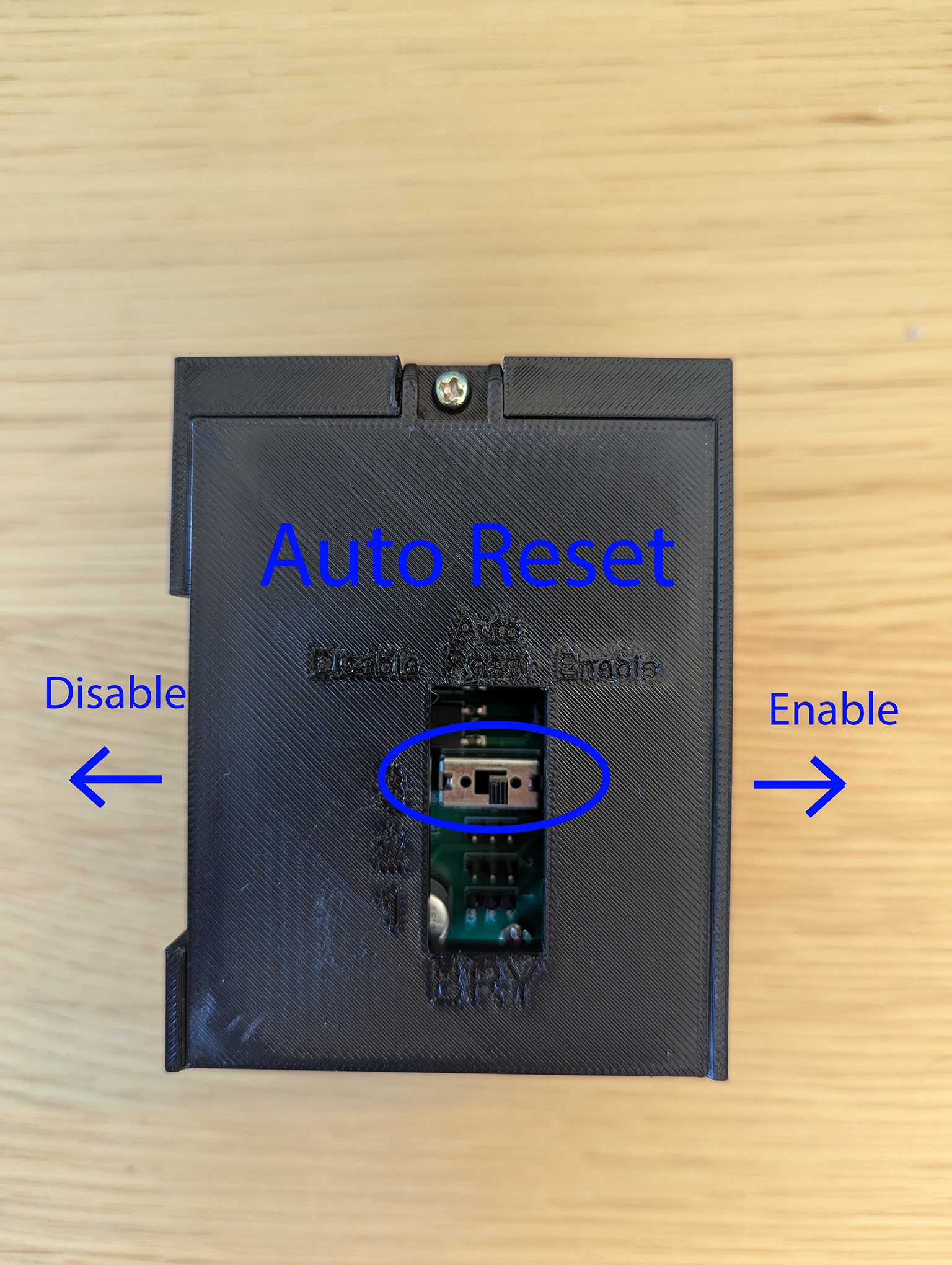
شکل 9. سوئیچ تنظیم مجدد خودکار
کنترلر را با کابل USB-A به هاست وصل کنید.

شکل 10. پورت اتصال USB-A به میزبان
شکل 11 نمونه ای از تنظیم کامل کنترلر Android 13 را برای یک سیستم روشنایی و سروو نشان می دهد.
شکل 11. نصب کنترلر اندروید 13 کامل شد
کنترل نرم افزار از میزبان
میکرو کد را می توان در UNO دانلود کرد تا پین های PWM را به سیگنال های موتور اختصاص دهد و محدوده های عرض پالس را برای زوایای مختلف تعریف کند. میکرو کد کنترل چرخش سروو شش موتور HS-755MB در سایر منابع گنجانده شده است. این بخش همچنین شامل پیوندی به یک برنامه ساده به نام rotator.py است که سرووها را می چرخاند.
با استفاده از کنترلر اندروید 13
استفاده از دوربین:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
با اسکریپت تست شامل:
python rotator.py --ch 1 --dir ON --debug