
এই পৃষ্ঠাটি ক্যামেরা ইমেজ টেস্ট স্যুট (ITS) এর অধীনে পরীক্ষাগুলির একটি বিস্তৃত তালিকা প্রদান করে, যা অ্যান্ড্রয়েড কম্প্যাটিবিলিটি টেস্ট স্যুট (CTS) যাচাইকারীর অংশ। আইটিএস পরীক্ষাগুলি কার্যকরী পরীক্ষা, যার অর্থ তারা চিত্রের গুণমান পরিমাপ করে না, তবে বিজ্ঞাপনের সমস্ত ক্যামেরা ফাংশন প্রত্যাশিত হিসাবে কাজ করছে। এই নথিটি বিকাশকারী এবং পরীক্ষকদের পৃথক পরীক্ষাগুলি কী করে এবং কীভাবে পরীক্ষা ব্যর্থতাগুলি ডিবাগ করতে হয় তা বুঝতে দেয়৷
ক্যামেরা আইটিএস গেটগুলি প্রয়োজনীয় ক্যামেরা বৈশিষ্ট্য, API স্তর এবং মিডিয়া পারফরম্যান্স ক্লাস (MPC) স্তর দ্বারা পরীক্ষা করে। API স্তরের জন্য, ITS ব্যবহার করে ro.product.first_api_level একটি নির্দিষ্ট API স্তরে যোগ করা গেট পরীক্ষা যা নিম্ন API স্তরের কার্যকারিতার জন্য নেতিবাচক ব্যবহারকারীর অভিজ্ঞতার জন্য পরীক্ষা করে। ITS ro.vendor.api_level ব্যবহার করে একটি নির্দিষ্ট API স্তরে যোগ করা বৈশিষ্ট্যগুলির জন্য গেট পরীক্ষা করার জন্য যার জন্য নতুন হার্ডওয়্যার ক্ষমতা প্রয়োজন। যদি ro.odm.build.media_performance_class একটি ডিভাইসের জন্য সংজ্ঞায়িত করা হয়, তাহলে MPC স্তরের উপর নির্ভর করে ITS-এর জন্য নির্দিষ্ট পরীক্ষা চালানো প্রয়োজন।
পরীক্ষাগুলি দৃশ্য অনুসারে গোষ্ঠীভুক্ত করা হয়েছে:
-
scene0: ক্যাপচার মেটাডেটা, জিটার, জাইরোস্কোপ, কম্পন -
scene1: এক্সপোজার, সংবেদনশীলতা, এক্সপোজার মান (EV) ক্ষতিপূরণ, YUV বনাম JPEG এবং RAW -
scene2: মুখ শনাক্তকরণ, রঙের দৃশ্যের প্রয়োজন পরীক্ষা -
scene3: প্রান্ত বর্ধন, লেন্স আন্দোলন -
scene4: আকৃতির অনুপাত, ক্রপিং, ফিল্ড-অফ-ভিউ -
scene5: লেন্স শেডিং -
scene6: জুম -
scene7: মাল্টি ক্যামেরা সুইচ -
scene8: অটো এক্সপোজার (AE) এবং অটো হোয়াইট ব্যালেন্স (AWB) অঞ্চল মিটারিং -
scene9: JPEG কম্প্রেশন -
scene_extensions: ক্যামেরা এক্সটেনশন -
scene_tele: টেলিফটো লেন্স স্যুইচিং -
scene_flash: অটোফ্ল্যাশ, ন্যূনতম ফ্রেম রেট -
scene_video: ফ্রেম ড্রপস -
sensor_fusion: ক্যামেরা এবং জাইরোস্কোপ টাইমিং অফসেট -
feature_combination: ফিচার কম্বিনেশন -
scene_ip: ডিফল্ট ক্যামেরা অ্যাপ এবং জেটপ্যাক ক্যামেরা অ্যাপের (জেসিএ) মধ্যে চিত্র সমতা
প্রতিটি দৃশ্যের বর্ণনার জন্য পৃথক বিভাগ দেখুন।
দৃশ্য0
পরীক্ষার জন্য কোনো নির্দিষ্ট দৃশ্যের তথ্যের প্রয়োজন হয় না। যাইহোক, জাইরোস্কোপ এবং ভাইব্রেশন পরীক্ষার জন্য ফোনটি অবশ্যই স্থির থাকতে হবে।
টেস্ট_জিটার
ক্যামেরার টাইমস্ট্যাম্পে জিটার পরিমাপ করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureResult#SENSOR_TIMESTAMP -
android.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGE
পাস: ফ্রেমের মধ্যে কমপক্ষে 30 ms ডেল্টা আছে।
নিচের চিত্রে, ছোট y-অক্ষ পরিসরটি লক্ষ্য করুন। জিটার আসলে এই প্লটে ছোট।
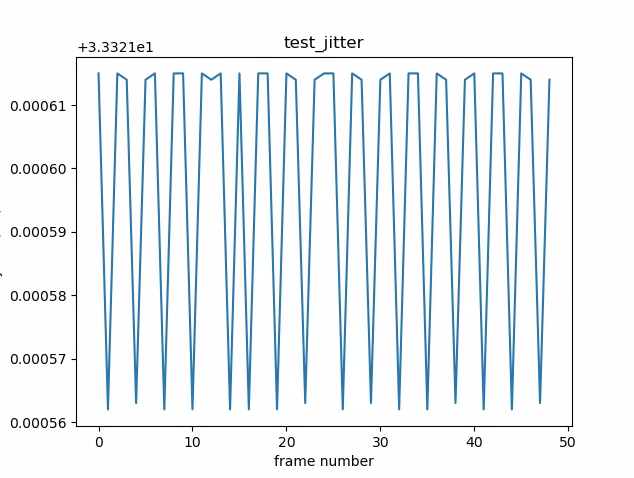
চিত্র 1. টেস্ট_জিটার প্লট।
test_metadata
মেটাডেটা এন্ট্রির বৈধতা পরীক্ষা করে, ক্যাপচার ফলাফল এবং ক্যামেরা বৈশিষ্ট্য বস্তুর দিকে তাকিয়ে. এই পরীক্ষাটি auto_capture_request এক্সপোজার ব্যবহার করে এবং মান অর্জন করে কারণ ছবির বিষয়বস্তু গুরুত্বপূর্ণ নয়।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#INFO_SUPPORTED_HARDWARE_LEVEL -
android.hardware.camera2.CameraCharacteristics#SCALER_CROPPING_TYPE -
android.hardware.camera2.CameraCharacteristics#SENSOR_BLACK_LEVEL_PATTERN -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_TIMESTAMP_SOURCE -
android.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATION -
android.hardware.camera2.CaptureResult#SENSOR_ROLLING_SHUTTER_SKEW
পাস: হার্ডওয়্যার লেভেল, rollingShutterSkew , frameDuration ট্যাগ, timestampSource , croppingType , blackLevelPattern , pixel_pitch , ফিল্ড অফ ভিউ (এফওভি), এবং হাইপারফোকাল দূরত্ব উপস্থিত এবং বৈধ মান রয়েছে।
test_request_capture_match
পরীক্ষা করে যে ডিভাইসটি সঠিক এক্সপোজার লেখে এবং ক্যাপচার মেটাডেটা ফিরে পড়ে মান অর্জন করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_EXPOSURE_TIME_RANGE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGE -
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureResult#SENSOR_SENSITIVITY
পাস: অনুরোধ এবং ক্যাপচার মেটাডেটা মান সমস্ত শট জুড়ে মেলে।
পরীক্ষা_সেন্সর_ইভেন্ট
সেন্সর ফিউশন সমর্থনের বিজ্ঞাপন দেয় এমন ডিভাইসগুলির জন্য, এই পরীক্ষাটি পরীক্ষা করে যে ডিভাইসটি সেন্সর ইভেন্টগুলিকে প্রশ্ন করে এবং মুদ্রণ করে কিনা। প্রত্যাশিত সেন্সরগুলি হল অ্যাক্সিলোমিটার, জাইরোস্কোপ এবং ম্যাগনেটোমিটার। স্ক্রীন চালু থাকলেই এই পরীক্ষাটি কাজ করে, মানে ডিভাইসটি স্ট্যান্ডবাই মোডে নেই।
APIs পরীক্ষিত:
পাস: প্রতিটি সেন্সরের জন্য ইভেন্ট প্রাপ্ত হয়.
টেস্ট_সলিড_রং_পরীক্ষা_প্যাটার্ন
ক্যামেরা নিঃশব্দের জন্য কঠিন রঙের পরীক্ষার প্যাটার্নগুলি সঠিকভাবে তৈরি করা হয়েছে এমন পরীক্ষা। ক্যামেরা নিঃশব্দ সমর্থিত হলে, কঠিন রঙ পরীক্ষা নিদর্শন সমর্থিত হতে হবে। ক্যামেরা মিউট করা সমর্থিত না হলে, শুধুমাত্র ক্ষমতার বিজ্ঞাপন দিলেই কঠিন রঙের পরীক্ষার প্যাটার্ন পরীক্ষা করা হয়।
যদি কাঁচা ছবিগুলি সমর্থিত হয়, রঙের অ্যাসাইনমেন্টও পরীক্ষা করা হয়। পরীক্ষিত রং হল কালো, সাদা, লাল, নীল এবং সবুজ। যে ক্যামেরাগুলি কাঁচা ছবি সমর্থন করে না তাদের জন্য শুধুমাত্র কালো পরীক্ষা করা হয়।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristic#SENSOR_AVAILABLE_TEST_PATTERN_MODES -
android.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_DATA -
android.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_MODE
পাস: সলিড টেস্ট প্যাটার্ন সমর্থিত সঠিক রঙ এবং ছবিতে কম বৈচিত্র্য রয়েছে।
পরীক্ষা_পরীক্ষা_প্যাটার্ন
প্রতিটি বৈধ পরীক্ষার প্যাটার্নের জন্য ফ্রেমগুলি ক্যাপচার করতে android.sensor.testPatternMode প্যারামিটার পরীক্ষা করে এবং ফ্রেমগুলি কঠিন রঙ এবং রঙের বারগুলির জন্য সঠিকভাবে তৈরি হয়েছে কিনা তা পরীক্ষা করে। এই পরীক্ষায় নিম্নলিখিত পদক্ষেপগুলি অন্তর্ভুক্ত রয়েছে:
- সমস্ত সমর্থিত পরীক্ষার নিদর্শনগুলির জন্য চিত্রগুলি ক্যাপচার করে৷
- কঠিন রঙ পরীক্ষার প্যাটার্ন এবং রঙের বারগুলির জন্য একটি সঠিকতা পরীক্ষা করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristic#SENSOR_AVAILABLE_TEST_PATTERN_MODES -
android.hardware.camera2.CaptureResult#SENSOR_TEST_PATTERN_MODE
পাস: সমর্থিত পরীক্ষার নিদর্শন সঠিকভাবে তৈরি করা হয়।
চিত্র 2. test_test_patterns উদাহরণ।
test_tonemap_curve
রৈখিক টোনম্যাপ সহ কাঁচা থেকে YUV-তে পরীক্ষার প্যাটার্নের রূপান্তর পরীক্ষা করে। টোনম্যাপ রূপান্তরের জন্য একটি নিখুঁত চিত্র প্যাটার্ন তৈরি করতে এই পরীক্ষার জন্য android.sensor.testPatternMode = 2 ( COLOR_BARS ) প্রয়োজন৷ যাচাই করে যে পাইপলাইনে লিনিয়ার টোনম্যাপ এবং আদর্শ ইমেজ ইনপুট সহ সঠিক রঙের আউটপুট রয়েছে ( test_test_patterns উপর নির্ভর করে)।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#DISTORTION_CORRECTION_MODE -
android.hardware.camera2.CaptureRequest#SENSOR_TEST_PATTERN_MODE -
android.hardware.camera2.CaptureRequest#TONEMAP_CURVE -
android.hardware.camera2.CaptureRequest#TONEMAP_MODE
পাস: YUV এবং RAW একে অপরের মতো দেখতে।

চিত্র 3. test_tonemap_curve raw উদাহরণ।

চিত্র 4. test_tonemap_curve YUV উদাহরণ।
test_unified_timestamp
ইমেজ এবং মোশন সেন্সর ইভেন্ট একই সময়ে ডোমেনে আছে কিনা তা পরীক্ষা করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureResult#SENSOR_TIMESTAMP -
android.hardware.Sensor -
android.hardware.SensorEvent -
android.hardware.Sensor#TYPE_ACCELEROMETER -
android.hardware.Sensor#TYPE_GYROSCOPE
পাস: মোশন টাইমস্ট্যাম্প দুটি ছবির টাইমস্ট্যাম্পের মধ্যে থাকে।
পরীক্ষা_কম্পন_সীমাবদ্ধতা
ডিভাইসের কম্পন প্রত্যাশা অনুযায়ী কাজ করছে কিনা তা পরীক্ষা করে।
APIs পরীক্ষিত:
-
android.hardware.Sensor -
android.hardware.SensorEvent -
android.hardware.Sensor#TYPE_ACCELEROMETER -
android.os.Vibrator -
android.hardware.camera2.CameraDevice#setCameraAudioRestriction
পাস: ক্যামেরা অডিও সীমাবদ্ধতা API দ্বারা নিঃশব্দ করা হলে ডিভাইসটি কম্পিত হয় না।
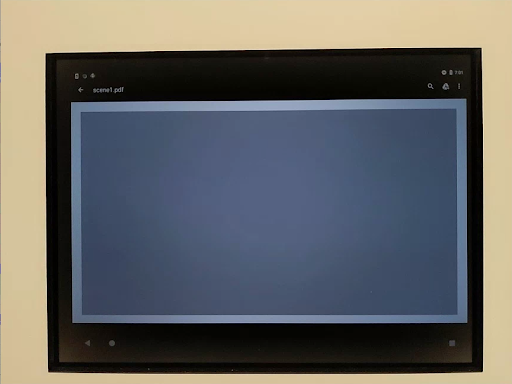
দৃশ্য1_1
scene1 1 একটি ধূসর চার্ট। ধূসর চার্টটি অবশ্যই ক্যামেরা FoV এর 30% কেন্দ্র কভার করবে। ধূসর চার্টটি 3A (AE, AWB, এবং AF) কে মাঝারিভাবে চ্যালেঞ্জ করবে বলে আশা করা হচ্ছে কারণ কেন্দ্র অঞ্চলে কোন বৈশিষ্ট্য নেই। যাইহোক, ক্যাপচার অনুরোধ পুরো দৃশ্যটি নির্দিষ্ট করে যা 3A-এর একত্রিত হওয়ার জন্য পর্যাপ্ত বৈশিষ্ট্য অন্তর্ভুক্ত করে।
RFoV ক্যামেরাগুলি WFoV বা RFoV টেস্ট রিগ-এ পরীক্ষা করা যেতে পারে। যদি WFoV টেস্ট রিগে একটি RFoV ক্যামেরা পরীক্ষা করা হয়, তাহলে চার্টটি 2/3 দ্বারা স্কেল করা হয় যাতে 3A কে একত্রিত হতে সাহায্য করার জন্য FoV-এ ধূসর চার্টের জন্য কিছু সীমানা নির্দিষ্ট করা হয়। ক্যামেরা পরীক্ষার রিগগুলির আরও বিশদ বিবরণের জন্য, ক্যামেরা আইটিএস-ইন-এ-বক্স দেখুন।
চিত্র 5. পূর্ণ আকারের দৃশ্য1 চার্ট (বাম), 2/3 স্কেলকৃত চার্ট (ডান)।
test_ae_precapture_trigger
প্রিক্যাপচার ট্রিগার ব্যবহার করার সময় AE স্টেট মেশিন পরীক্ষা করে। AE অক্ষম সহ পাঁচটি ম্যানুয়াল অনুরোধ ক্যাপচার করে। শেষ অনুরোধে একটি AE প্রিক্যাপচার ট্রিগার রয়েছে, যেটিকে উপেক্ষা করা উচিত কারণ AE অক্ষম করা হয়েছে৷
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODE -
android.hardware.camera2.CaptureRequest#CONTROL_AE_PRECAPTURE_TRIGGER -
android.hardware.camera2.CaptureResult#CONTROL_AE_STATE
পাস: AE একত্রিত হয়।
test_auto_vs_manual
স্বয়ংক্রিয় এবং ম্যানুয়াল শট ক্যাপচার করা পরীক্ষাগুলি একই দেখায়।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINS -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORM -
android.hardware.camera2.CaptureResult#TONEMAP_CURVE -
android.hardware.camera2.CaptureResult#TONEMAP_MODE
পাস: ক্যামেরার 3A অ্যালগরিদম থেকে স্বয়ংক্রিয় সাদা ব্যালেন্স estimate সাথে মেলে প্রতিটি ক্যাপচার ফলাফলে ম্যানুয়াল হোয়াইট ব্যালেন্স লাভ এবং ট্রান্সফর্ম।

চিত্র 6. test_auto_vs_manual auto উদাহরণ।

চিত্র 7. test_auto_vs_manual সাদা ব্যালেন্স উদাহরণ।

চিত্র 8. test_auto_vs_manual ম্যানুয়াল হোয়াইট ব্যালেন্স রূপান্তর উদাহরণ।
পরীক্ষা_কালো_সাদা
পরীক্ষা করে যে ডিভাইসটি সম্পূর্ণ কালো এবং সাদা ছবি তৈরি করে। দুটি ক্যাপচার নেয়, প্রথমটি অত্যন্ত কম লাভ এবং সংক্ষিপ্ত এক্সপোজার সহ, যার ফলে একটি কালো ফটো হয় এবং দ্বিতীয়টি অত্যন্ত উচ্চ লাভ এবং দীর্ঘ এক্সপোজার সহ, যার ফলে একটি সাদা ফটো হয়৷
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
পাস: কালো এবং সাদা ছবি তৈরি করে। সাদা ছবির স্যাচুরেটেড চ্যানেলের RGB মান রয়েছে [255, 255, 255] যার ত্রুটির মার্জিন 1% এর কম পার্থক্য রয়েছে।
চিত্র 9. পরীক্ষা_কালো_সাদা, কালো উদাহরণ।

চিত্র 10. পরীক্ষা_কালো_সাদা, সাদা উদাহরণ।
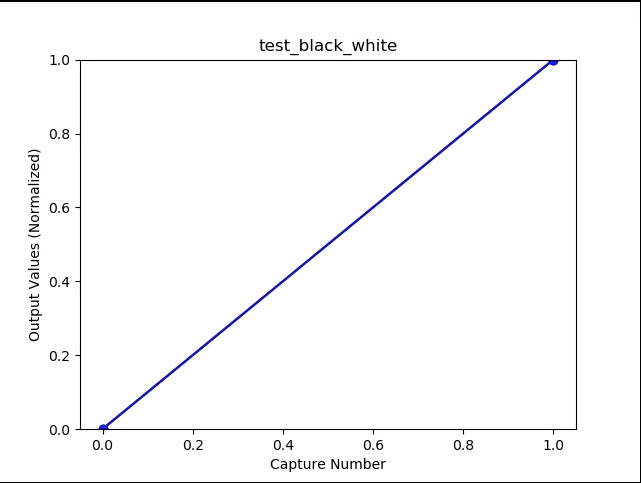
চিত্র 11. টেস্ট_কালো_সাদা, প্লট মানে উদাহরণ।
test_burst_capture
যাচাই করে যে পুরো ক্যাপচার পাইপলাইনটি পূর্ণ আকারের ক্যাপচার এবং CPU সময়ের গতির সাথে চলতে পারে।
APIs পরীক্ষিত:
পাস: পূর্ণ-আকারের চিত্রগুলির একটি বিস্ফোরণ ক্যাপচার করে, ফ্রেম ড্রপ এবং ছবির উজ্জ্বলতা পরীক্ষা করে।
test_burst_samameness_manual
ম্যানুয়াল ক্যাপচার সেটিং সহ 50টি চিত্রের 5টি বিস্ফোরণ নেয় এবং সেগুলি সব অভিন্ন কিনা তা পরীক্ষা করে৷ বিক্ষিপ্ত ফ্রেমগুলি আলাদাভাবে প্রক্রিয়া করা হয়েছে বা শিল্পকর্ম আছে কিনা তা সনাক্ত করতে এই পরীক্ষাটি ব্যবহার করুন।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_MANUAL_SENSOR -
android.hardware.camera2.CameraMetadata#SYNC_MAX_LATENCY_PER_FRAME_CONTROL
পাস: চিত্রগুলি দৃশ্যত এবং RGB মানগুলিতে অভিন্ন৷
ব্যর্থ: প্রতিটি বিস্ফোরণের শুরুতে RGB গড় চার্টের একটি স্পাইক বা ড্রপ দেখায়
-
first_API_level<30 এর জন্য সহনশীলতা 3% -
first_API_level>= 30 এর জন্য সহনশীলতা 2%

চিত্র 12. test_burst_sameness_manual গড় উদাহরণ।

চিত্র 13. পরীক্ষা_বার্স্ট_সমতা_ম্যানুয়াল_প্লট_অর্থ
পরীক্ষা_ফসলের_অঞ্চল_কাঁচা
পরীক্ষা করে যে RAW স্ট্রীম ক্রপযোগ্য নয়।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZE -
android.hardware.camera2.CaptureResult#SCALER_CROP_REGION -
android.hardware.camera2.CaptureRequest#SCALER_CROP_REGION
পাস: YUV ছবিগুলি কেন্দ্রে কাটা হয় কিন্তু RAW ছবি নয়৷

চিত্র 14. test_crop_region_raw comp কাঁচা ফসলের উদাহরণ।

চিত্র 15. test_crop_region_raw comp raw পূর্ণ উদাহরণ।

চিত্র 16. test_crop_region_raw comp YUV ফসলের উদাহরণ।

চিত্র 17. test_crop_region_raw YUV সম্পূর্ণ উদাহরণ।
পরীক্ষা_ফসলের_অঞ্চল
ক্রপ অঞ্চল কাজ করে যে পরীক্ষা. একটি সম্পূর্ণ চিত্র নেয় এবং পাঁচটি ভিন্ন অঞ্চলের প্যাচ তৈরি করে (কোণা এবং কেন্দ্র।) পাঁচটি অঞ্চলের জন্য ক্রপ সেট সহ ছবি তোলে। প্যাচ এবং ক্রপ ছবির মান তুলনা করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZE -
android.hardware.camera2.CaptureRequest#SCALER_CROP_REGION
পাস: ক্রপ করা অঞ্চলের চিত্রটি প্যাচের সাথে মেলে যা ক্রপ চিত্রের সাথে মিলে যায়।
পরীক্ষা_ইভি_ক্ষতিপূরণ
পরীক্ষা করে যে এক্সপোজার মান (EV) ক্ষতিপূরণ প্রয়োগ করা হয়েছে। পরীক্ষাটি একটি মৌলিক বিভাগ এবং একটি উন্নত বিভাগ নিয়ে গঠিত।
মৌলিক বিভাগ পরীক্ষা করে যে CONTROL_AE_COMPENSATION_STEP দিয়ে তৈরি একটি পরিসর ব্যবহার করে EV ক্ষতিপূরণ প্রয়োগ করা হয়। প্রতিটি ক্ষতিপূরণ মূল্যে আটটি ফ্রেম ক্যাপচার করা হয়।
উন্নত বিভাগটি আটটি ধাপে এক্সপোজার বাড়ায় এবং প্রত্যাশিত উজ্জ্বলতার বিপরীতে পরিমাপকৃত উজ্জ্বলতা পরীক্ষা করে। কোনো EV ক্ষতিপূরণ প্রয়োগ না করেই প্রত্যাশিত মানগুলি চিত্রের উজ্জ্বলতা থেকে গণনা করা হয় এবং যদি গণনা করা মানগুলি প্রকৃত চিত্র মান পরিসীমা অতিক্রম করে তবে প্রত্যাশিত মান পরিপূর্ণ হয়৷ পরীক্ষা ব্যর্থ হয় যদি প্রত্যাশিত মান এবং পরিমাপ করা মান মেলে না বা চিত্রগুলি পাঁচটি ধাপের মধ্যে অতিমাত্রায় প্রকাশ পায়।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_COMPENSATION_STEP -
android.hardware.camera2.CaptureRequest#CONTROL_AE_EXPOSURE_COMPENSATION -
android.hardware.camera2.CaptureRequest#CONTROL_AE_LOCK -
android.hardware.camera2.CaptureResult#CONTROL_AE_STATE -
android.hardware.camera2.CaptureRequest#CONTROL_AWB_LOCK -
android.hardware.camera2.CaptureResult#TONEMAP_CURVE -
android.hardware.camera2.CaptureResult#TONEMAP_MODE
বেসিক সেকশন পাস: চিত্রগুলি পাঁচটি ধাপের মধ্যে অতিরিক্ত এক্সপোজার ছাড়াই ক্রমবর্ধমান এক্সপোজার দেখায়।
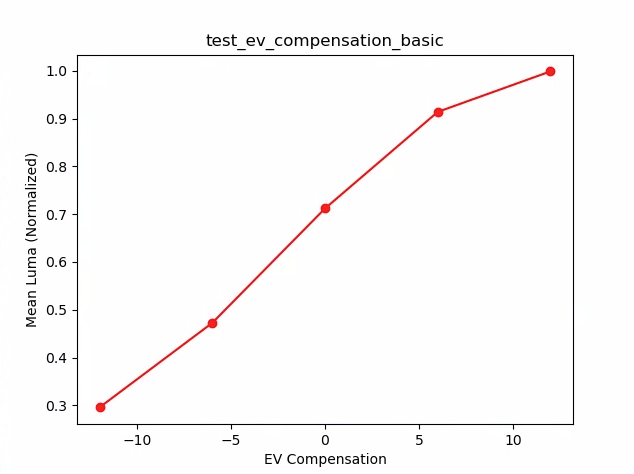
চিত্র 18. পরীক্ষা_ইভি_ক্ষতিপূরণ_বেসিক।
উন্নত বিভাগ পাস: EV ক্ষতিপূরণ সেটিং বৃদ্ধির সাথে সাথে লুমার বৃদ্ধি ক্যাপচার করে। প্রতিটি EV ক্ষতিপূরণ সেটিং এর জন্য ক্যাপচার করা আটটি ফ্রেমের স্থিতিশীল লুমা মান রয়েছে।
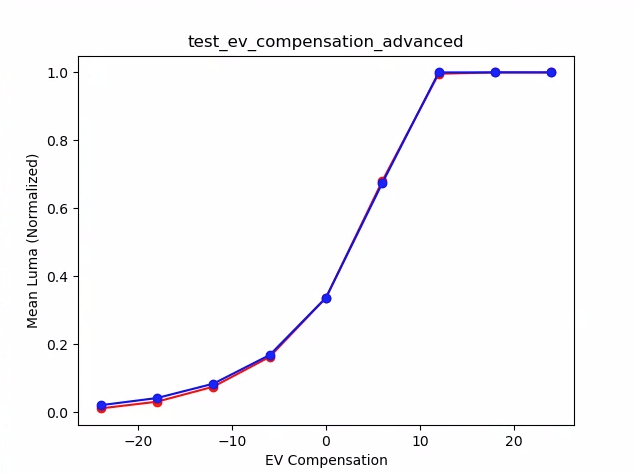
চিত্র 19. test_ev_compensation_advanced_plot_means.
test_exposure_x_iso
পরীক্ষা করে যে একটি ধ্রুবক এক্সপোজার ISO হিসাবে অর্জন করা হয় এবং এক্সপোজার সময় পরিবর্তিত হয়। একে অপরের ভারসাম্য বজায় রাখার জন্য ISO এবং এক্সপোজার সময় বেছে নেওয়া শটগুলির একটি সিরিজ নেয়। ফলাফলগুলির উজ্জ্বলতা একই হওয়া উচিত, তবে ক্রম অনুসারে চিত্রটি আরও শোরগোল হওয়া উচিত। নমুনা পিক্সেল গড় মান একে অপরের কাছাকাছি যাচাই করে। যাচাই করে যে ছবিগুলি 0 বা 1 এ আটকানো নেই (যা সেগুলিকে ফ্ল্যাট লাইনের মতো দেখাবে)। পরীক্ষাটি আপনার কনফিগারেশন ফাইলে debug পতাকা সেট করে RAW চিত্রগুলির সাথেও চালানো যেতে পারে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
পাস: চিত্রগুলির উজ্জ্বলতা একই, তবে উচ্চতর আইএসওর সাথে আরও শোরগোল পান৷ আরজিবি প্লেনগুলি সমতল হয় যখন পরীক্ষিত লাভ স্পেসের উপর ISO*এক্সপোজারের মান স্থির থাকে।
ব্যর্থ প্রক্রিয়া: নিম্নলিখিত চিত্রে, লাভ গুণক মান (x-অক্ষ) বৃদ্ধির সাথে সাথে স্বাভাবিককৃত RGB সমতল গড় মান (y-অক্ষ) কম লাভ গুণক মান থেকে বিচ্যুত হতে শুরু করে।
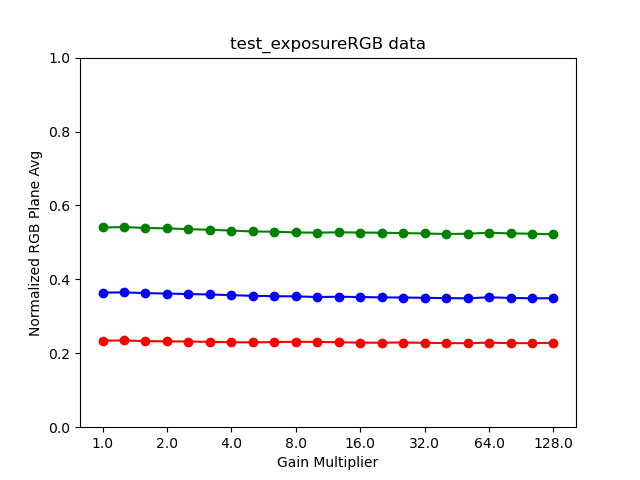
চিত্র 20. টেস্ট_এক্সপোজার_প্লট_অর্থ।

চিত্র 21. test_exposure_mult=1.00।

চিত্র 22। test_exposure_mult=64.00।
test_latching
পরীক্ষা করে যে সেটিংস (এক্সপোজার এবং লাভ) FULL এবং LEVEL_3 ক্যামেরার জন্য সঠিক ফ্রেমে ল্যাচ করে। ব্যাক-টু-ব্যাক অনুরোধগুলি ব্যবহার করে শটগুলির একটি সিরিজ নেয়, শটগুলির মধ্যে ক্যাপচার অনুরোধের পরামিতিগুলিকে আলাদা করে৷ ইমেজ প্রত্যাশিত বৈশিষ্ট্য আছে কিনা পরীক্ষা করে.
APIs পরীক্ষিত:
পাস: চিত্রগুলি [2, 3, 6, 8, 10, 12, 13] আইএসও বা এক্সপোজার বাড়িয়েছে এবং নীচের চিত্রে প্লটে উচ্চতর আরজিবি মানে দেখানো হয়েছে।
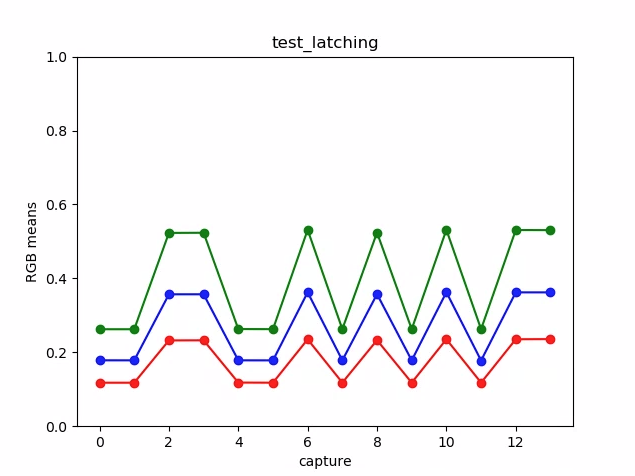
চিত্র 23. test_latching প্লট মানে উদাহরণ।

চিত্র 24. test_latching i=00.

চিত্র 25. test_latching i=01.

চিত্র 26. test_latching i=02.

চিত্র 27. test_latching i=03.
চিত্র 28. test_latching i=04.

চিত্র 29. test_latching i=05.

চিত্র 30. test_latching i=06.

চিত্র 31. test_latching i=07.

চিত্র 32. test_latching i=08.

চিত্র 33. test_latching i=09.

চিত্র 34. test_latching i=10.

চিত্র 35. test_latching i=11.

চিত্র 36. test_latching i=12.
test_linearity
পরীক্ষা করে যে ডিভাইস প্রক্রিয়াকরণ লিনিয়ার পিক্সেলে উল্টানো যেতে পারে। একটি অভিন্ন লক্ষ্যে নির্দেশিত ডিভাইসের সাথে শটের একটি ক্রম ক্যাপচার করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGE -
android.hardware.camera2.CaptureRequest#BLACK_LEVEL_LOCK -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureRequest#TONEMAP_CURVE -
android.hardware.camera2.CaptureRequest#TONEMAP_MODE
পাস: R, G, B মান অবশ্যই বর্ধিত সংবেদনশীলতার সাথে রৈখিকভাবে বৃদ্ধি পাবে।
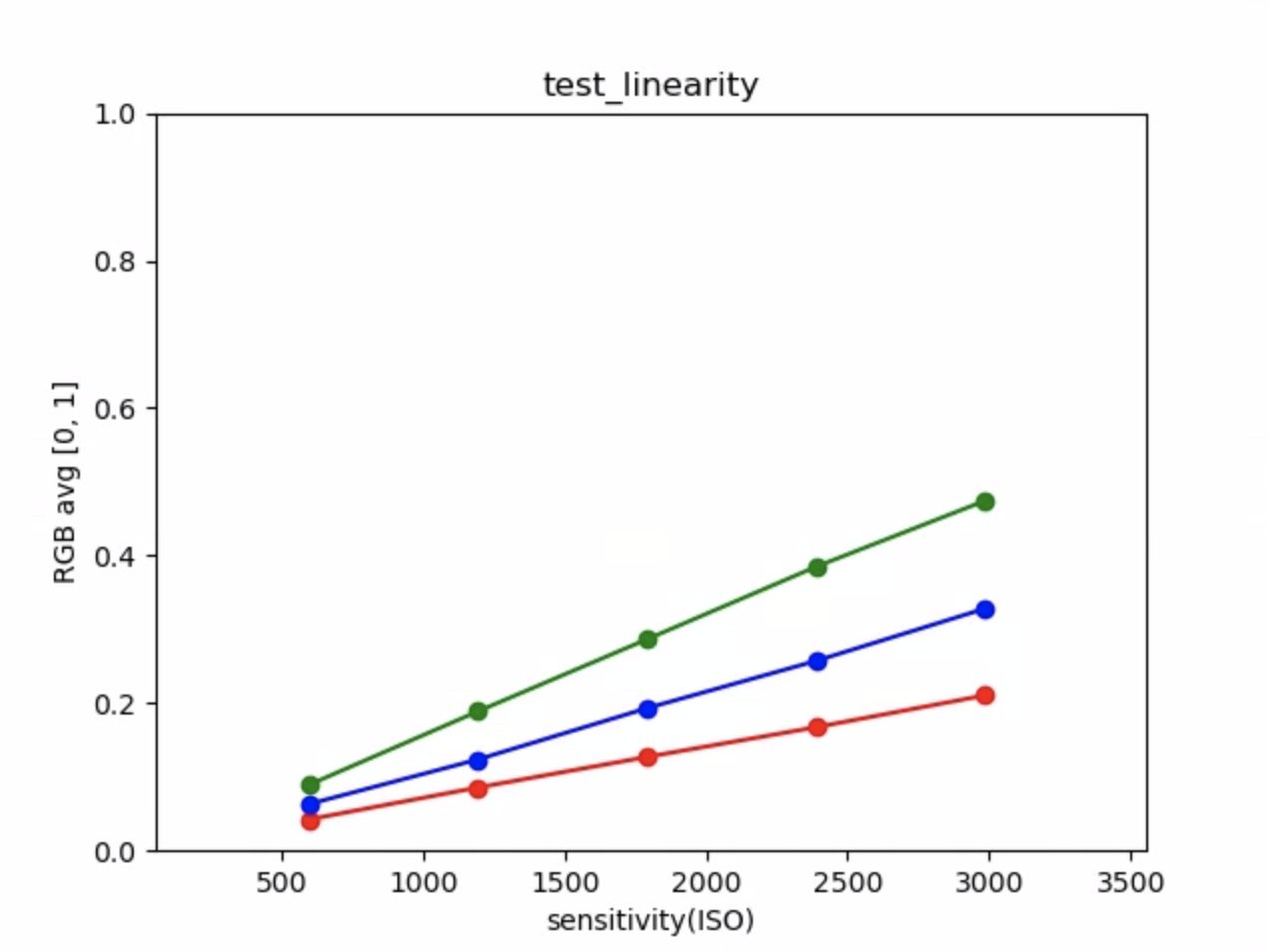
চিত্র 37. test_linearity প্লট মানে উদাহরণ।
test_locked_burst
3A লক এবং YUV বার্স্ট পরীক্ষা করে (স্বয়ংক্রিয় সেটিং ব্যবহার করে)। MANUAL_SENSOR বা PER_FRAME_CONTROLS নেই এমন সীমিত ডিভাইসগুলিতেও এই পরীক্ষাটি পাস করার জন্য ডিজাইন করা হয়েছে৷ CTS-এ ফ্রেম রেট চেক করার সময় পরীক্ষা YUV ছবির সামঞ্জস্যতা পরীক্ষা করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#CONTROL_AE_LOCK -
android.hardware.camera2.CaptureRequest#CONTROL_AWB_LOCK
পাস: ক্যাপচারগুলি সামঞ্জস্যপূর্ণ দেখাচ্ছে।
চিত্র 38. test_locked_burst frame0 উদাহরণ।
চিত্র 39. test_locked_burst frame1 উদাহরণ।
চিত্র 40. test_locked_burst frame2 উদাহরণ।
দৃশ্য1_2
scene 1_2 scene 1_1 এর একটি কার্যকরীভাবে অভিন্ন অনুলিপি, scene 1 এর বর্ধিত সময়কাল উপশম করার জন্য একটি সাবসিন কাঠামো বাস্তবায়ন করে।
পরীক্ষা_পরম_রং_সংশোধন
পরীক্ষা করে যে android.colorCorrection.* প্যারামিটারগুলি সেট করার সময় প্রয়োগ করা হয়। বিভিন্ন রূপান্তর এবং লাভের মান সহ শট নেয়, এবং পরীক্ষা করে যে তারা অনুরূপভাবে ভিন্ন দেখায়। আউটপুট ক্রমবর্ধমান লাল বা নীল করার জন্য রূপান্তর এবং লাভগুলি বেছে নেওয়া হয়। একটি রৈখিক টোনম্যাপ ব্যবহার করে।
টোন ম্যাপিং হল এমন একটি কৌশল যা ইমেজ প্রসেসিং-এ ব্যবহার করা হয় একটি রঙের একটি সেটকে অন্য রঙের সাথে ম্যাপ করার জন্য একটি মাধ্যম যা একটি আরও সীমিত গতিশীল পরিসীমা আছে উচ্চ-ডাইনামিক-রেঞ্জের চিত্রগুলির আনুমানিক উপস্থিতি।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINS -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODE -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORM
পাস: রূপান্তর অনুসারে R এবং B মানগুলি বৃদ্ধি পায়।

চিত্র 41. test_param_color_correction প্লট মানে উদাহরণ।
নিম্নলিখিত চিত্রগুলিতে, x-অক্ষ হল ক্যাপচার অনুরোধগুলি: 0 = ঐক্য, 1 = লাল বুস্ট এবং 2 = নীল বুস্ট।
চিত্র 42. test_param_color_correction req=0 একতার উদাহরণ।
চিত্র 43. test_param_color_correctness req=1 লাল বুস্ট উদাহরণ।

চিত্র 44. test_param_color_correction req=2 নীল বুস্ট উদাহরণ।
test_param_flash_mode
পরীক্ষা করে যে android.flash.mode প্যারামিটার প্রয়োগ করা হয়েছে। ম্যানুয়ালি এক্সপোজারটিকে অন্ধকার দিকে সেট করে, যাতে এটি স্পষ্ট হয় যে ফ্ল্যাশ ফায়ার হয়েছে কি না, এবং একটি লিনিয়ার টোনম্যাপ ব্যবহার করে৷ ফ্ল্যাশ ফায়ার হয়েছে কিনা তা যাচাই করতে একটি বড় গ্রেডিয়েন্ট তৈরি করা হয়েছে কিনা তা দেখতে টাইল ইমেজ সহ কেন্দ্রটি পরীক্ষা করে।
APIs পরীক্ষিত:
পাস: টাইল চিত্রের কেন্দ্রে একটি বড় গ্রেডিয়েন্ট রয়েছে, যার অর্থ ফ্ল্যাশটি উড়িয়ে দেওয়া হয়েছে।

চিত্র 45. test_param_flash_mode 1 উদাহরণ।

চিত্র 46. test_param_flash_mode একটি টাইলের উদাহরণ।

চিত্র 47. test_param_flash_mode 2 উদাহরণ।

চিত্র 48. test_param_flash_mode দুটি টাইলের উদাহরণ।
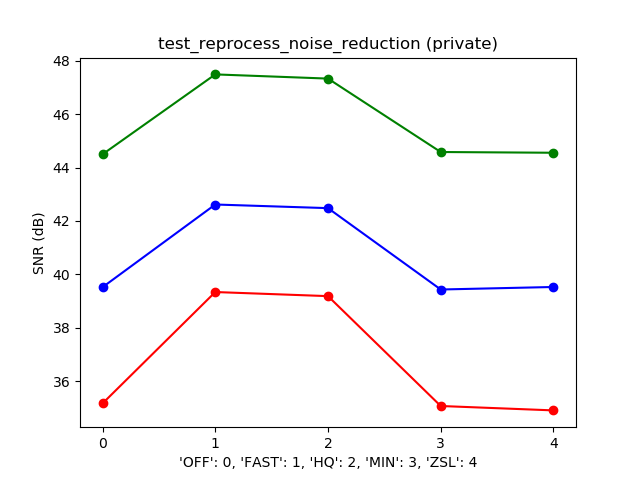
পরীক্ষা_পরম_শব্দ_হ্রাস
পরীক্ষা করে যে android.noiseReduction.mode প্যারামিটার সেট করার সময় সঠিকভাবে প্রয়োগ করা হয়েছে। অস্পষ্টভাবে আলোকিত ক্যামেরা দিয়ে ছবি ক্যাপচার করে। ক্যাপচার করা ছবিটি শোরগোলপূর্ণ তা নিশ্চিত করতে সাহায্য করার জন্য একটি উচ্চ অ্যানালগ লাভ ব্যবহার করে। NR বন্ধ, দ্রুত এবং উচ্চ মানের জন্য তিনটি ছবি ক্যাপচার করে। এছাড়াও কম লাভ এবং NR বন্ধ সহ একটি চিত্র ক্যাপচার করে এবং এর বৈচিত্রটিকে বেসলাইন হিসাবে ব্যবহার করে। সিগন্যাল টু নয়েজ (SNR) অনুপাত যত বেশি হবে ছবির গুণমান তত ভালো হবে।
APIs পরীক্ষিত:
পাস: SNR বিভিন্ন শব্দ কমানোর মোডের সাথে পরিবর্তিত হয় এবং নিম্নলিখিত গ্রাফের অনুরূপ আচরণ করে:

চিত্র 49. test_param_noise_reduction প্লট SNRs উদাহরণ।
0: বন্ধ, 1: দ্রুত, 2: HQ, 3: MIN , 4: ZSL

চিত্র 50. test_param_noise_reduction উচ্চ লাভ nr=0 উদাহরণ।

চিত্র 51. test_param_noise_reduction উচ্চ লাভ nr=1 উদাহরণ।
চিত্র 52. test_param_noise_reduction উচ্চ লাভ nr=2 উদাহরণ।
চিত্র 53. test_param_noise_reduction উচ্চ লাভ nr=3 উদাহরণ।

চিত্র 54. test_param_noise_reduction কম লাভের উদাহরণ।
test_param_shading_mode
পরীক্ষা করে যে android.shading.mode প্যারামিটার প্রয়োগ করা হয়েছে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#SHADING_MODE -
android.hardware.camera2.CaptureRequest#STATISTICS_LENS_SHADING_MAP_MODE -
android.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAP
পাস: শেডিং মোডগুলি সুইচ করা হয়েছে এবং লেন্স শেডিং মানচিত্রগুলি প্রত্যাশিত হিসাবে পরিবর্তিত হয়েছে৷

চিত্র 55. test_param_shading_mode লেন্স শেডিং মানচিত্র, মোড 0 লুপ 0 উদাহরণ।

চিত্র 56. test_param_shading_mode লেন্স শেডিং মানচিত্র, মোড 1 লুপ 0 উদাহরণ।

চিত্র 57. test_param_shading_mode লেন্স শেডিং মানচিত্র, মোড 2 লুপ 0 উদাহরণ।
test_param_tonemap_mode
পরীক্ষা করে যে android.tonemap.mode প্যারামিটার প্রয়োগ করা হয়েছে। প্রতিটি R, G, B চ্যানেলে বিভিন্ন টোনম্যাপ বক্ররেখা প্রয়োগ করে এবং আউটপুট চিত্রগুলি প্রত্যাশিত হিসাবে পরিবর্তিত হয়েছে কিনা তা পরীক্ষা করে। এই পরীক্ষাটি দুটি পরীক্ষা নিয়ে গঠিত, test1 এবং test2 ।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraMetadata#TONEMAP_MODE_CONTRAST_MODE -
android.hardware.camera2.CameraMetadata#TONEMAP_MODE_FAST -
android.hardware.camera2.CaptureRequest#TONEMAP_CURVE -
android.hardware.camera2.CaptureRequest#TONEMAP_MODE
পাস:
-
test1: উভয় চিত্রের একটি রৈখিক টোনম্যাপ রয়েছে, কিন্তুn=1একটি স্টিপার গ্রেডিয়েন্ট রয়েছে। G (সবুজ) চ্যানেলটিn=1ছবির জন্য উজ্জ্বল। -
test2: একই টোনম্যাপ, কিন্তু ভিন্ন দৈর্ঘ্য। ছবি একই.

চিত্র 58. n=0 সহ test_param_tonemap_mode.

চিত্র 59. n=1 সহ test_param_tonemap_mode.
test_post_raw_sensitivity_boost
চেক পোস্ট কাঁচা সংবেদনশীলতা বুস্ট. বিভিন্ন সংবেদনশীলতার সাথে কাঁচা এবং YUV ছবির একটি সেট ক্যাপচার করে, কাঁচা সংবেদনশীলতা বুস্ট কম্বিনেশন পোস্ট করে এবং আউটপুট পিক্সেল মানে অনুরোধ সেটিংসের সাথে মেলে কিনা তা পরীক্ষা করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_POST_RAW_SENSITIVITY_BOOST_RANGE -
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW -
android.hardware.camera2.CaptureRequest#CONTROL_POST_RAW_SENSITIVITY_BOOST -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
পাস: বুস্ট বাড়ার সাথে সাথে কাঁচা ছবিগুলি গাঢ় হয় যখন YUV ছবির উজ্জ্বলতা স্থির থাকে।

চিত্র 60. test_post_raw_sensitivity_boost raw s=3583 boost=0100 উদাহরণ।
চিত্র 61. test_post_raw_sensitivity_boost raw s=1792 boost=0200 উদাহরণ।

চিত্র 62. test_post_raw_sensitivity_boost raw s=0896 boost=0400 উদাহরণ।

চিত্র 63. test_post_raw_sensitivity_boost raw s=0448 boost=0800 উদাহরণ।

চিত্র 64. test_post_raw_sensitivity_boost raw s=0224 boost=1600 উদাহরণ।
চিত্র 65. test_post_raw_sensitivity_boost raw s=0112 boost=3199 উদাহরণ।
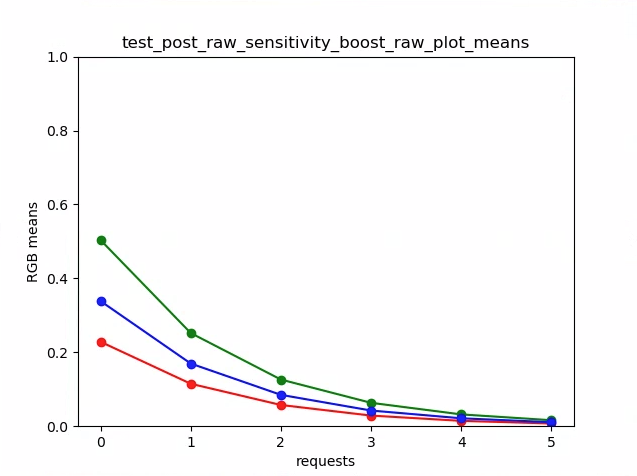
চিত্র 66. test_post_raw_sensitivity_boost কাঁচা প্লট মানে উদাহরণ।

চিত্র 67. test_post_raw_sensitivity_boost YUV s=0112 boost=3199 উদাহরণ।

চিত্র 68. test_post_raw_sensitivity_boost YUV s=0448 boost=0800 উদাহরণ।

চিত্র 69. test_post_raw_sensitivity_boost YUV s=0896 boost=0400 উদাহরণ।

চিত্র 70. test_post_raw_sensitivity_boost YUV s=1792 boost=0200 উদাহরণ।

চিত্র 71. test_post_raw_sensitivity_boost YUV s=3585 boost=0100 উদাহরণ।
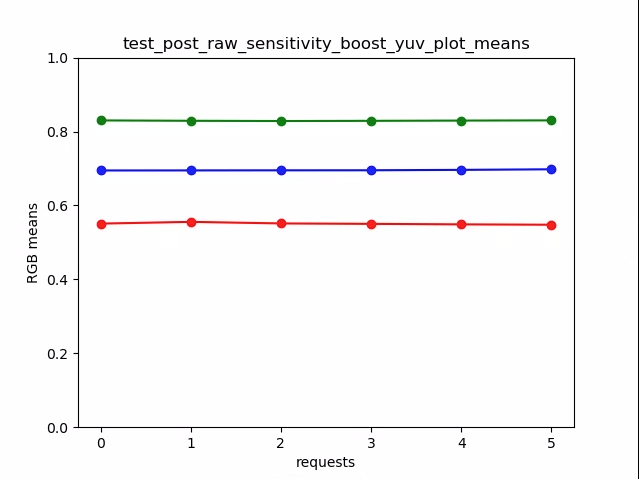
চিত্র 72. test_post_raw_sensitivity_boost_yuv_plot_means
test_raw_exposure
ক্রমবর্ধমান এক্সপোজার সময়ের সাথে কাঁচা চিত্রের একটি সেট ক্যাপচার করে এবং পিক্সেল মান পরিমাপ করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW -
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME
পাস: ISO (লাভ) বৃদ্ধি করা পিক্সেলগুলিকে আলোর প্রতি আরও সংবেদনশীল করে তোলে, তাই প্লটটি বাম দিকে চলে যায়।
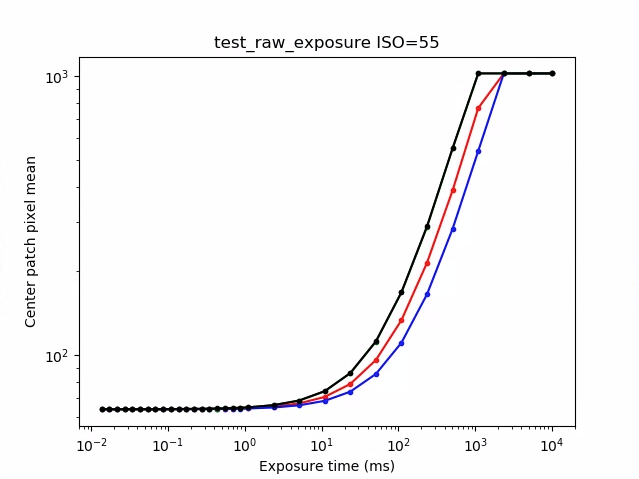
চিত্র 73. test_raw_exposure ISO=55 উদাহরণ।
10⁰ হল 1 ms, 10¹ হল 10 ms, এবং 10⁻¹ হল 0.1 ms৷
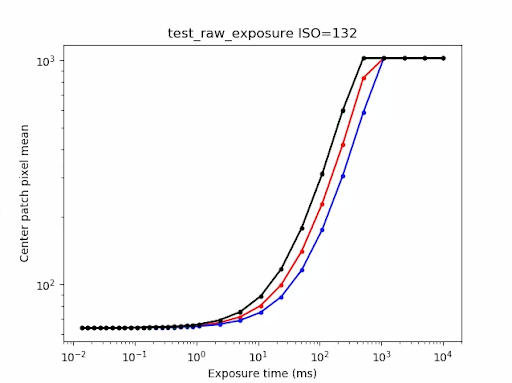
চিত্র 74. test_raw_exposure ISO=132 উদাহরণ।
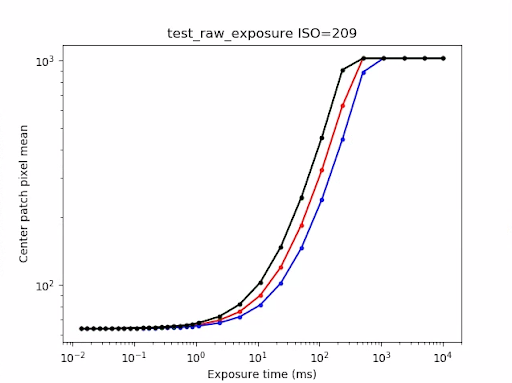
চিত্র 75. test_raw_exposure ISO=209 উদাহরণ।
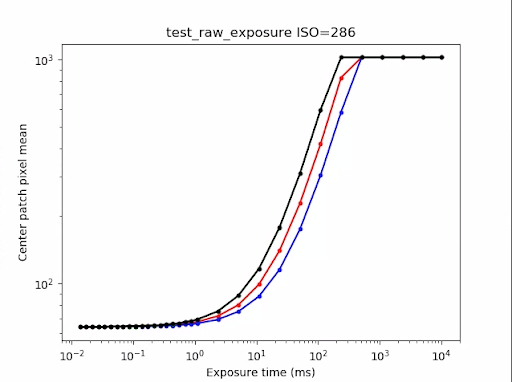
চিত্র 76. test_raw_exposure ISOs=286 উদাহরণ।
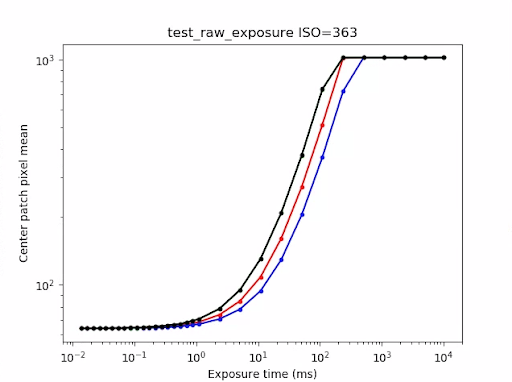
চিত্র 77. test_raw_exposure ISO=363 উদাহরণ।
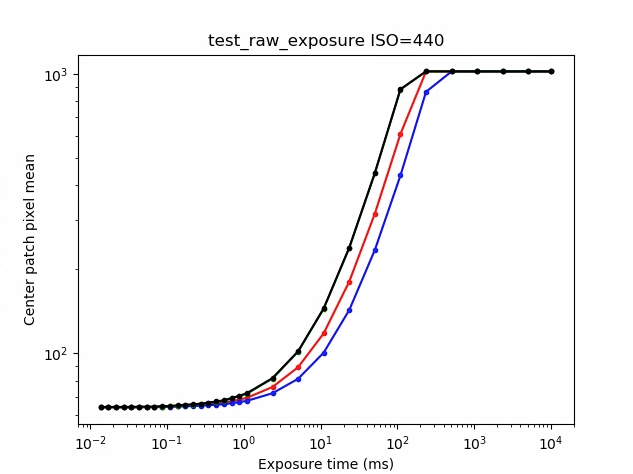
চিত্র 78. test_raw_exposure ISO=440 উদাহরণ।
পরীক্ষা_পুনঃপ্রক্রিয়া_শব্দ_হ্রাস
পরীক্ষা করে যে android.noiseReduction.mode রিপ্রসেসিং রিকোয়েস্টের জন্য প্রয়োগ করা হয়েছে। অস্পষ্টভাবে আলোকিত ক্যামেরা দিয়ে পুনঃপ্রক্রিয়াকৃত ছবি ক্যাপচার করে। ক্যাপচার ইমেজ শোরগোল তা যাচাই করতে একটি উচ্চ অ্যানালগ লাভ ব্যবহার করে। NR বন্ধ, দ্রুত এবং উচ্চ মানের জন্য তিনটি পুনঃপ্রক্রিয়াকৃত ছবি ক্যাপচার করে। কম লাভ এবং NR বন্ধ সহ একটি পুনঃপ্রসেস করা চিত্র ক্যাপচার করে এবং এর বৈচিত্রটিকে বেসলাইন হিসাবে ব্যবহার করে।
APIs পরীক্ষিত:
পাস: দ্রুত >= বন্ধ, সদর দপ্তর >= দ্রুত, এবং সদর দফতর >> বন্ধ।
চিত্র 79. সাধারণ SNR বনাম NR মোড প্লট উদাহরণ।
test_tonemap_sequence
বিভিন্ন টোনম্যাপ বক্ররেখা দিয়ে শটের একটি ক্রম পরীক্ষা করে। একটি রৈখিক টোনম্যাপ সহ 3টি ম্যানুয়াল শট ক্যাপচার করে৷ ডিফল্ট টোনম্যাপ সহ 3টি ম্যানুয়াল শট ক্যাপচার করে। প্রতিটি পরপর ফ্রেম জোড়ার মধ্যে ডেল্টা গণনা করে।
APIs পরীক্ষিত:
পাস: তিনটি অভিন্ন ফ্রেমের পরে তিনটি অভিন্ন ফ্রেমের একটি ভিন্ন সেট রয়েছে৷
চিত্র 80. test_tonemap_sequence i=0 উদাহরণ।
চিত্র 81. test_tonemap_sequence i=1 উদাহরণ।
চিত্র 82. test_tonemap_sequence i=2 উদাহরণ।

চিত্র 83. test_tonemap_sequence i=3 উদাহরণ।

চিত্র 84. test_tonemap_sequence i=4 উদাহরণ।

চিত্র 85. test_tonemap_sequence i=5 উদাহরণ।
test_yuv_jpeg_all
ইমেজ ক্যাপচারের জন্য সমস্ত রিপোর্ট করা মাপ এবং ফরম্যাটগুলি পরীক্ষা করে। একটি রৈখিক টোনম্যাপ সহ একটি ম্যানুয়াল অনুরোধ ব্যবহার করে যাতে image_processing_utils মডিউল দ্বারা রূপান্তরিত হলে YUV এবং JPEG একই দেখায়। ছবিগুলি ডিফল্টরূপে সংরক্ষণ করা হয় না, তবে debug_mode সক্ষম করে সংরক্ষণ করা যেতে পারে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#TONEMAP_CURVE -
android.hardware.camera2.CaptureRequest#TONEMAP_MODE -
android.graphics.ImageFormat#JPEG
পাস: সমস্ত ইমেজ সেন্টারে সর্বোচ্চ রেজোলিউশন YUV ইমেজের 3% সহ RGB রূপান্তরিত ছবিতে সর্বাধিক রুট গড় বর্গক্ষেত্র (RMS) (একটি সংকেতের মান) পার্থক্য রয়েছে।
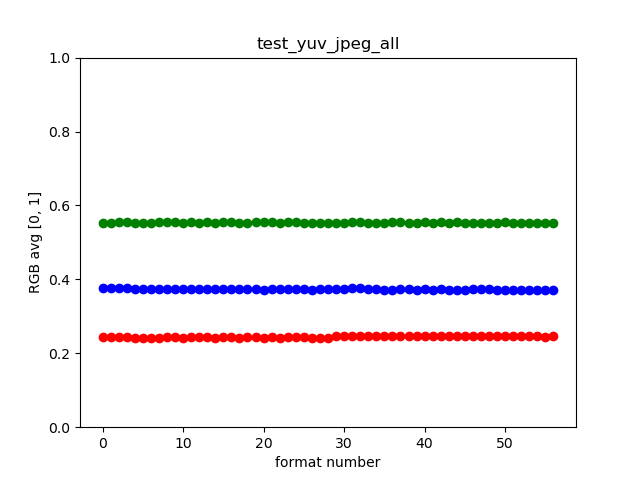
চিত্র 86. test_yuv_jpeg_all উদাহরণ।
test_yuv_plus_dng
ইমেজ ক্যাপচারের জন্য রিপোর্ট করা মাপ এবং ফরম্যাট কাজ করে তা পরীক্ষা করে।
APIs পরীক্ষিত:
পাস: পরীক্ষা সম্পন্ন হয় এবং অনুরোধ করা ছবি ফেরত দেয়।
চিত্র 87. test_yuv_plus_dng উদাহরণ।
দৃশ্য1_3
scene 1_3 scene 1_1 এর একটি কার্যকরীভাবে অভিন্ন অনুলিপি, scene 1 এর বর্ধিত সময়কাল উপশম করার জন্য একটি সাবসিন কাঠামো বাস্তবায়ন করে।
পরীক্ষা_ক্যাপচার_ফলাফল
পরীক্ষা করে যে বৈধ ডেটা CaptureResult অবজেক্টে ফিরে আসে। পরীক্ষায় একটি স্বয়ংক্রিয় ক্যাপচার, একটি ম্যানুয়াল ক্যাপচার এবং একটি দ্বিতীয় স্বয়ংক্রিয় ক্যাপচার থাকে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODE -
android.hardware.camera2.CaptureRequest#CONTROL_AE_REGIONS -
android.hardware.camera2.CaptureRequest#CONTROL_AF_MODE -
android.hardware.camera2.CaptureRequest#CONTROL_AF_REGIONS -
android.hardware.camera2.CaptureRequest#CONTROL_AWB_MODE -
android.hardware.camera2.CaptureRequest#CONTROL_AWB_REGIONS -
android.hardware.camera2.CaptureRequest#CONTROL_MODE -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINS -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORM -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODE -
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAP -
android.hardware.camera2.CaptureRequest#STATISTICS_LENS_SHADING_MAP_MODE -
android.hardware.camera2.CaptureRequest#TONEMAP_CURVE -
android.hardware.camera2.CaptureRequest#TONEMAP_MODE
পাস: মেটাডেটা সমস্ত ক্যাপচারের জন্য বৈধ এবং ম্যানুয়াল সেটিংস দ্বিতীয় স্বয়ংক্রিয় ক্যাপচারে ফাঁস হয় না। ক্যাপচারের জন্য লেন্স শেডিং সংশোধন প্লট আউট.

চিত্র 88. test_capture_result_plot_lsc_auto_ch0.
test_dng_noise_model
DNG কাঁচা মডেলের প্যারামিটার সঠিক কিনা তা যাচাই করে। প্লটটি বিভিন্ন সংবেদনশীলতার পরিসরে ক্যাপচার করা কাঁচা শটগুলিতে ধূসর কার্ডের একটি কেন্দ্রের প্যাচের পরিমাপিত বৈচিত্র্যকে চিত্রিত করে, এবং ক্যামেরা HAL-তে DNG নয়েজ মডেলের দ্বারা প্রতিটি সংবেদনশীলতায় প্রত্যাশিত বৈচিত্রের সাথে এই মানগুলির তুলনা করে (ক্যাপচার ফলাফলের বস্তুগুলিতে ফিরে আসা O,S প্যারামিটারের উপর ভিত্তি করে)। DNG নয়েজ মডেলের আরও বিশদ বিবরণের জন্য, DNG নয়েজ মডেলে নিম্নলিখিত নথিটি ডাউনলোড করুন।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVEL -
android.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITY -
android.hardware.camera2.CaptureResult#SENSOR_NOISE_PROFILE -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY
পাস: DNG কাঁচা মডেলের পরামিতি সঠিক। প্রত্যাশিত RGB মান পরিমাপ করা প্রকৃত RGB মানের সাথে মেলে।
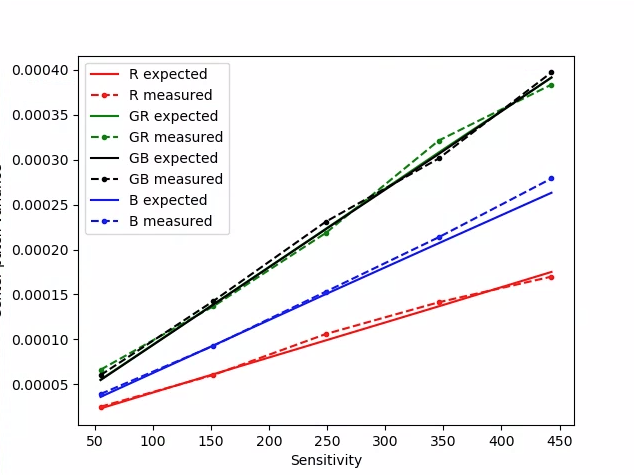
চিত্র 89. test_dng_noise_model_plog.
test_jpeg
YUV ইমেজ এবং ডিভাইস JPEG ইমেজ রূপান্তরিত পরীক্ষা একই দেখায়। পরীক্ষাটি চিত্রের 10% কেন্দ্রে নেয় এবং RGB মান গণনা করে এবং সেগুলি মিলেছে কিনা তা যাচাই করে৷
APIs পরীক্ষিত:
পাস: প্রতিটি ছবির মধ্যে গড় RGB পার্থক্য 3% এর কম।

চিত্র 90. test_jpeg_fmt=jpg.jpg।

চিত্র 91. test_jpeg=fmt=yuv.jpg।
test_raw_burst_sensitivity
ক্রমবর্ধমান লাভের সাথে কাঁচা চিত্রের একটি সেট ক্যাপচার করে এবং গোলমাল পরিমাপ করে। শুধুমাত্র কাঁচা ক্যাপচার, একটি বিস্ফোরণ মধ্যে.
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_ACTIVE_ARRAY_SIZE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVEL -
android.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITY -
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW
পাস: প্রতিটি শট আগের শটের চেয়ে বেশি শোরগোল, কারণ লাভ বাড়ছে।
কেন্দ্র পরিসংখ্যান গ্রিড কক্ষের ভিন্নতা ব্যবহার করে।
চিত্র 92. test_raw_burst_sensitivity_variance.
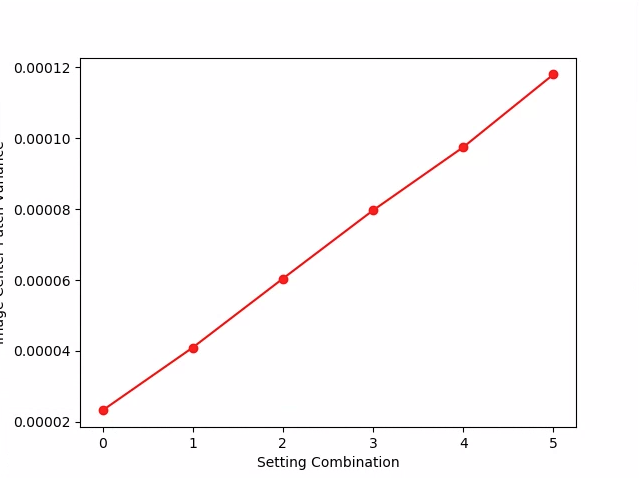
পরীক্ষা_কাঁচা_সংবেদনশীলতা
ক্রমবর্ধমান সংবেদনশীলতার সাথে কাঁচা চিত্রগুলির একটি সেট ক্যাপচার করে এবং ছবির 10% কেন্দ্রে গোলমাল (ভেরিয়েন্স) পরিমাপ করে৷ পরীক্ষা করে যে প্রতিটি শট আগেরটির চেয়ে বেশি শোরগোল।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_PRE_CORRECTION_ACTIVE_ARRAY_SIZE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_WHITE_LEVEL -
android.hardware.camera2.CameraCharacteristics#SENSOR_MAX_ANALOG_SENSITIVITY -
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW
পাস: প্রতিটি শটের সাথে বৈচিত্র্য বাড়ে।
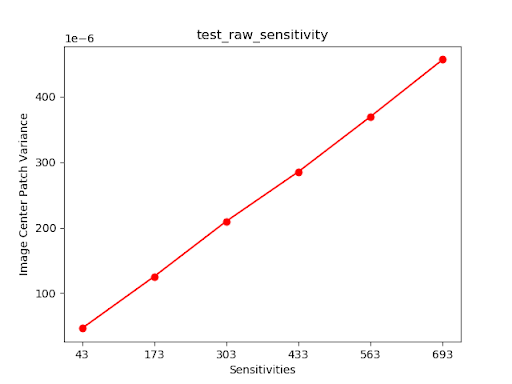
চিত্র 93. test_raw_sensitivity_variance.
test_yuv_plus_jpeg
YUV এবং JPEG উভয় আউটপুট হিসাবে একটি একক ফ্রেম ক্যাপচার করা পরীক্ষা। একটি রৈখিক টোনম্যাপ সহ একটি ম্যানুয়াল অনুরোধ ব্যবহার করে যাতে image_processing_utils মডিউল দ্বারা রূপান্তরিত হলে YUV এবং JPEG একই দেখায়।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#TONEMAP_CURVE -
android.hardware.camera2.CaptureRequest#TONEMAP_MODE -
android.graphics.ImageFormat#JPEG
পাস: YUV এবং JPEG চিত্রগুলি একই রকম এবং 1% এর কম RMS (একটি সংকেতের মান) পার্থক্য রয়েছে৷

চিত্র 94. JPEG বিন্যাস সহ test_yuv_plus_jpeg.

চিত্র 95. YUV বিন্যাস সহ test_yuv_plus_jpeg.
test_yuv_plus_raw
সমর্থিত হলে একটি একক ফ্রেমকে কাঁচা (10-বিট এবং 12-বিট কাঁচা) এবং YUV আউটপুট হিসাবে ক্যাপচার করার পরীক্ষা। রৈখিক টোনম্যাপের সাথে একটি ম্যানুয়াল অনুরোধ ব্যবহার করে তাই কাঁচা এবং YUV একই হবে বলে আশা করা হচ্ছে। RGB রূপান্তরিত ছবির কেন্দ্রে 10% RGB মান তুলনা করে। লগ android.shading.mode .
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_RAW -
android.hardware.camera2.CaptureResult#STATISTICS_LENS_SHADING_CORRECTION_MAP -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODE -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_GAINS -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_TRANSFORM -
android.hardware.camera2.CaptureRequest#CONTROL_AWB_MODE -
android.hardware.camera2.CaptureRequest#CONTROL_MODE -
android.hardware.camera2.CaptureRequest#SHADING_MODE -
android.hardware.camera2.CaptureRequest#TONEMAP_CURVE -
android.hardware.camera2.CaptureRequest#TONEMAP_MODE -
android.hardware.graphics.ImageFormat#RAW10 -
android.hardware.graphics.ImageFormat#RAW12
পাস: YUV এবং কাঁচা চিত্রগুলি একই রকম এবং 3.5% এর কম RMS (একটি সংকেতের মূল-মান-বর্গ মান) পার্থক্য রয়েছে৷

চিত্র 96. test_yuv_plus_raw_shading=1_raw.jpg।
চিত্র 97. test_yuv_plus_raw_shading=1_yuv.jpg।
পরীক্ষা_সংবেদনশীলতা_অগ্রাধিকার
উচ্চতর ISO এবং বর্ধিত শব্দ মাত্রার মধ্যে সম্পর্ক নিশ্চিত করতে বিভিন্ন ISO সেটিংস জুড়ে CONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITY পরীক্ষা করে৷
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraMetadata#CONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITY -
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureResult#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureRequest#CONTROL_AE_PRIORITY_MODE -
android.hardware.camera2.CaptureResult#CONTROL_AE_PRIORITY_MODE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGE -
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODE -
android.hardware.camera2.CaptureResult#CONTROL_AE_MODE -
android.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ON -
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_PRIORITY_MODES
পাস: উচ্চতর ISO এর ফলে শব্দের মাত্রা বৃদ্ধি পায়।
পরীক্ষা এড়িয়ে যাওয়ার মানদণ্ড
test_sensitivity_priority.py পরীক্ষাটি বাদ দেওয়া হয় যদি নিম্নলিখিত মানদণ্ডগুলির মধ্যে কোনটি পূরণ করা হয়:
- ডিভাইসটির একটি প্রথম API স্তর রয়েছে (
first_api_level) 35 বা তার কম৷ - ডিভাইসটি
CONTROL_AE_AVAILABLE_PRIORITY_MODESএCONTROL_AE_PRIORITY_MODE_SENSOR_SENSITIVITY_PRIORITYবিজ্ঞাপন দেয় না।
পরীক্ষা_এক্সপোজার_টাইম_অগ্রাধিকার
বিভিন্ন এক্সপোজার সময় জুড়ে CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITY পরীক্ষা করে, ISO ক্ষতিপূরণ দিতে পারে এমন পরিসরে স্থিতিশীল উজ্জ্বলতা পরীক্ষা করে৷
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraMetadata#CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITY -
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureRequest#CONTROL_AE_PRIORITY_MODE -
android.hardware.camera2.CaptureResult#CONTROL_AE_PRIORITY_MODE -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_SENSITIVITY_RANGE -
android.hardware.camera2.CaptureResult#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODE -
android.hardware.camera2.CaptureResult#CONTROL_AE_MODE -
android.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ON -
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_PRIORITY_MODES
পাস: ISO এর ক্ষতিপূরণ সীমার মধ্যে থাকলে উজ্জ্বলতা স্থিতিশীল (সহনশীলতার মধ্যে) এক্সপোজার সময় জুড়ে।
পরীক্ষা এড়িয়ে যাওয়ার মানদণ্ড
test_exposure_time_priority পরীক্ষাটি বাদ দেওয়া হয় যদি নিম্নলিখিত মানদণ্ডগুলির মধ্যে কোনটি পূরণ করা হয়:
- ডিভাইসটির একটি প্রথম API স্তর রয়েছে (
first_api_level) 35 বা তার কম৷ - ডিভাইসটি
CONTROL_AE_PRIORITY_MODE_SENSOR_EXPOSURE_TIME_PRIORITYCONTROL_AE_AVAILABLE_PRIORITY_MODESএ বিজ্ঞাপন দেয় না।
দৃশ্য2_a
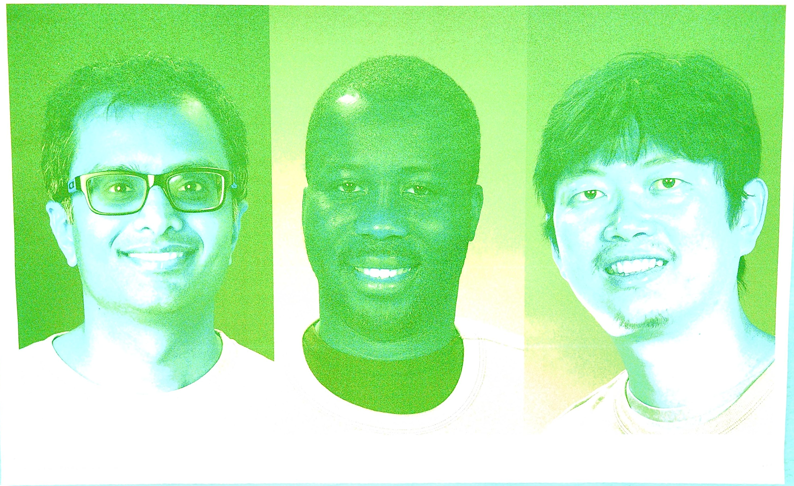
scene2_a তিনটি মুখ রয়েছে যার একটি ধূসর পটভূমি এবং নিরপেক্ষ পোশাক রয়েছে। মুখগুলি ত্বকের টোনগুলির বিস্তৃত পরিসরের জন্য বেছে নেওয়া হয়। সঠিকভাবে কাজ করার জন্য চার্টে মুখ সনাক্তকরণের জন্য সঠিক অভিযোজন থাকতে হবে।

চিত্র 98. দৃশ্য২_একটি উদাহরণ।
test_autoframing
ক্যামেরা ডিভাইসের অটোফ্রেমিং আচরণ পরীক্ষা করে। একটি বড় জুম সঞ্চালন করে যাতে দৃশ্যের কোনও মুখই দৃশ্যমান হয় না, CaptureRequest True AUTOFRAMING করে অটোফ্রেমিং মোড সক্ষম করে এবং যখন স্টেট একত্রিত হয় তখন আসল দৃশ্যের সমস্ত মুখ সনাক্ত করা যায় কিনা তা যাচাই করে (অর্থাৎ, যখন AUTOFRAMING_STATE এ CaptureResult এ AUTOFRAMING_STATE_CONVERGED এ সেট করা হয়)।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_AUTOFRAMING_AVAILABLE -
android.hardware.camera2.CaptureRequest#CONTROL_AUTOFRAMING -
android.hardware.camera2.CaptureResult#CONTROL_AUTOFRAMING -
android.hardware.camera2.CaptureResult#CONTROL_AUTOFRAMING_STATE
পাস: তিনটি মুখই সনাক্ত করা হয়েছে।
test_display_p3
ColorSpaceProfiles API ব্যবহার করে JPEG-তে P3 ক্যাপচার প্রদর্শন করে । পরীক্ষা করে যে ক্যাপচার করা JPEG এর শিরোনামে একটি উপযুক্ত ICC প্রোফাইল রয়েছে এবং ছবিতে sRGB স্বরগ্রামের বাইরের রঙ রয়েছে৷
APIs পরীক্ষিত:
-
android.hardware.camera2.params.ColorSpaceProfiles -
android.hardware.camera2.params.SessionConfiguration#setColorSpace
পাস: JPEG-এ একটি ডিসপ্লে P3 ICC প্রোফাইল এবং sRGB স্বরগ্রামের বাইরের রঙ রয়েছে।
পরীক্ষার_ প্রভাব
সমর্থিত ক্যামেরা প্রভাবগুলির জন্য ফ্রেম ক্যাপচার করে এবং সেগুলি সঠিকভাবে তৈরি হয়েছে কিনা তা পরীক্ষা করে। পরীক্ষাটি শুধুমাত্র প্রভাবগুলি OFF এবং MONO পরীক্ষা করে, কিন্তু সমস্ত সমর্থিত প্রভাবগুলির জন্য ছবি সংরক্ষণ করে৷
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_AVAILABLE_EFFECTS -
android.hardware.camera2.CaptureRequest#CONTROL_EFFECT_MODE
পাস: ইফেক্ট OFF সহ দৃশ্যের চিত্র ক্যাপচার করে এবং MONO সেট করা প্রভাব সহ একটি একরঙা চিত্র।
চিত্র 99. test_effects_MONO.
test_exposure_keys_consistent
এই পরীক্ষাটি AE-অক্ষম ক্যাপচারের সাথে AE-সক্ষম ক্যাপচারের গড় লুমার তুলনা করে যা ম্যানুয়ালি AE-সক্ষম ক্যাপচারের CaptureResult প্রাপ্ত এক্সপোজার প্যারামিটার (সংবেদনশীলতা, এক্সপোজার সময়, ফ্রেমের সময়কাল, পোস্ট কাঁচা সংবেদনশীলতা বুস্ট) প্রয়োগ করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureRequest#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATION -
android.hardware.camera2.CaptureRequest#CONTROL_POST_RAW_SENSITIVITY_BOOST -
android.hardware.camera2.CaptureResult#SENSOR_SENSITIVITY -
android.hardware.camera2.CaptureResult#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureResult#SENSOR_FRAME_DURATION -
android.hardware.camera2.CaptureResult#CONTROL_POST_RAW_SENSITIVITY_BOOST
পাস: দুটি ক্যাপচারের মধ্যে লুমার আপেক্ষিক পার্থক্য 4 শতাংশের কম।
test_format_combos
আউটপুট ফরম্যাটের বিভিন্ন সমন্বয় পরীক্ষা করে।
APIs পরীক্ষিত:
android.hardware.camera2.CameraCharacteristics#SCALER_STREAM_CONFIGURATION_MAPandroid.hardware.camera2.params.StreamConfigurationMap#getOutputSizes()android.hardware.camera2.CameraCaptureSession#captureBurst()
পাস: সমস্ত সংমিশ্রণ সফলভাবে ক্যাপচার করা হয়েছে।
পরীক্ষার_সংখ্যা_মুখ
টেস্ট ফেস ডিটেকশন।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureResult#STATISTICS_FACES -
android.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
পাস: তিনটি মুখ খুঁজে বের করে।
চিত্র 100. test_num_faces মুখ সনাক্তকরণ মোড 1 উদাহরণ।
test_reprocess_uv_swap
পরীক্ষা যে YUV পুনরায় প্রক্রিয়াকরণ U এবং V প্লেনগুলিকে অদলবদল করে না। এটি পুনঃপ্রক্রিয়াজাত চিত্র এবং একটি অ-পুনঃপ্রক্রিয়াজাত ক্যাপচারের মধ্যে পরম পার্থক্যের যোগফল (SAD) গণনা করে সনাক্ত করা হয়। যদি পুনঃপ্রক্রিয়াকৃত ক্যাপচারের আউটপুট U এবং V প্লেনগুলিকে অদলবদল করার ফলে SAD বৃদ্ধি পায়, তাহলে আউটপুটে সঠিক U এবং V প্লেন রয়েছে বলে ধরে নেওয়া হয়।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraDevice#createCaptureSession -
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_YUV_REPROCESSING -
android.hardware.camera2.CaptureRequest#EDGE_MODE -
android.hardware.camera2.CaptureResult#NOISE_REDUCTION_MODE
পাস: U এবং V প্লেনগুলি অদলবদল করা হয় না।
চিত্র 101. test_reprocess_uv_swap উদাহরণ।
দৃশ্য2_খ
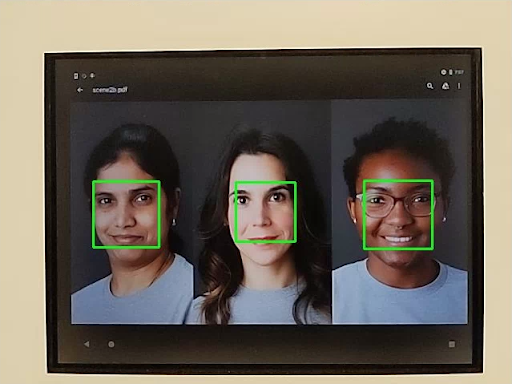
পরীক্ষার_প্রিভিউ_সংখ্যা_মুখ
মুখের দৃশ্যে ত্বকের স্বর বৈচিত্র্যের সাথে প্রিভিউতে মুখ সনাক্তকরণ পরীক্ষা করে।
APIs পরীক্ষিত:
-
android.hardware.camera2.CaptureResult#STATISTICS_FACES -
android.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
পাস: ফেস বাউন্ডিং বাক্সে মুখের ল্যান্ডমার্ক সহ তিনটি মুখ খুঁজে পায়।
চিত্র 102. test_num_faces মুখ সনাক্তকরণ মোড 1 উদাহরণ।
test_yuv_jpeg_capture_sameness
1920x1440 রেজোলিউশনের বেশি না হওয়া বৃহত্তম JPEG ফর্ম্যাটের মতো একই আকৃতির অনুপাত সহ বৃহত্তম সাধারণ YUV এবং JPEG ফর্ম্যাটগুলি ব্যবহার করে দুটি চিত্র ক্যাপচার করে৷ jpeg.quality 100 এ সেট করে এবং দ্বৈত পৃষ্ঠের অনুরোধ ক্যাপচার করে। উভয় চিত্রকে RGB অ্যারেতে রূপান্তর করে এবং দুটি চিত্রের মধ্যে 3D রুট গড় বর্গক্ষেত্র (RMS) পার্থক্য গণনা করে।
উপরন্তু, এই পরীক্ষাটি যাচাই করে যে সমস্ত সমর্থিত স্ট্রীম ব্যবহারের ক্ষেত্রে YUV আউটপুটগুলি STILL_CAPTURE ব্যবহারের ক্ষেত্রে YUV-এর সাথে যুক্তিসঙ্গতভাবে একই রকম।
APIs পরীক্ষিত:
-
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_STREAM_USE_CASES -
android.hardware.camera2.CaptureRequest#JPEG_QUALITY -
android.graphics.ImageFormat#JPEG
পাস: STILL_CAPTURE ব্যবহারের ক্ষেত্রে YUV এবং JPEG চিত্রগুলির মধ্যে 3% এর কম RMS (একটি সংকেতের রুট-মিন-স্কয়ার মান) পার্থক্য রয়েছে; YUV images for all supported use cases have less than 10% RMS difference from YUV images with the STILL_CAPTURE use case.
scene2_c
test_num_faces
Tests face detection with increased skin tone diversity in face scenes.
APIs tested:
-
android.hardware.camera2.CaptureResult#STATISTICS_FACES -
android.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Pass: Finds three faces.

Figure 103. test_num_faces face detection mode example.
test_jpeg_capture_perf_class
Tests JPEG capture latency for the S performance class as specified in section 2.2.7.2 Camera in the CDD.
Pass: MUST have camera2 JPEG capture latency < 1000 ms for 1080p resolution as measured by the CTS camera PerformanceTest under ITS lighting conditions (3000K) for both primary cameras.
test_camera_launch_perf_class
Tests camera launch latency for the S performance class as specified section 2.2.7.2 Camera in the CDD.
Pass: MUST have camera2 startup latency (open camera to first preview frame) < 600ms as measured by the CTS camera PerformanceTest under ITS lighting conditions (3000K) for both primary cameras.
test_default_camera_hdr
Tests that default camera capture is Ultra HDR for performance class 15 as specified in section 2.2.7.2 Camera of the CDD.
Pass: Default camera package capture MUST be Ultra HDR for a performance class 15 device.
scene2_d
test_preview_num_faces
Tests face detection in preview with increased skin tone diversity in face scenes.
APIs tested:
-
android.hardware.camera2.CaptureResult#STATISTICS_FACES -
android.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Pass: Finds three faces with face landmarks in the face bounding boxes.
scene2_e
test_continuous_picture
50 VGA resolution frames are captured with the capture request first setting android.control.afMode = 4 (CONTINUOUS_PICTURE).
APIs tested:
-
android.hardware.camera2.CaptureRequest#CONTROL_AF_MODE -
android.hardware.camera2.CaptureResult#CONTROL_AE_STATE -
android.hardware.camera2.CaptureResult#CONTROL_AF_STATE -
android.hardware.camera2.CaptureResult#CONTROL_AWB_STATE
Pass: 3A system settles by the end of a 50-frame capture.
test_num_faces
Tests face detection with increased skin tone diversity in face scenes.
APIs tested:
-
android.hardware.camera2.CaptureResult#STATISTICS_FACES -
android.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Pass: Finds 3 faces.
scene2_f
scene2_f has three faces with a white background and white clothing. The faces have a wide range of skin tones and high contrast with the background.

Figure 104. scene2_f example.
test_preview_num_faces
Tests face detection with increased skin tone diversity in face scenes.
APIs tested:
-
android.hardware.camera2.CaptureResult#STATISTICS_FACES -
android.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Pass: Finds three faces with face landmarks in the face bounding boxes.
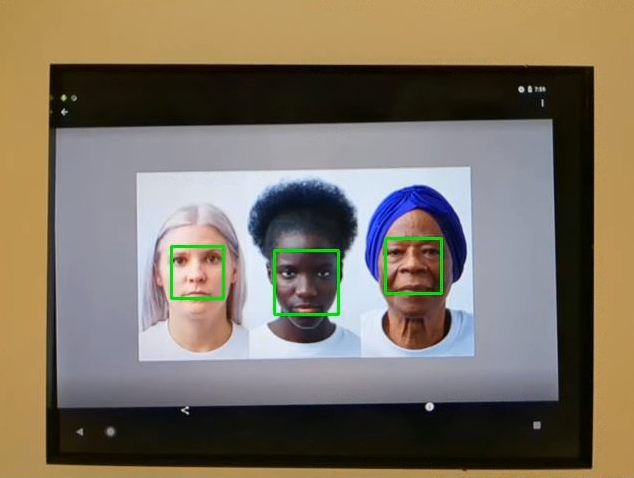
Figure 105. test_num_faces_fd_mode_1 example.
scene2_g
scene2_g has three profile faces with a white background and white clothing. The faces have a wide range of skin tones and high contrast with the background.

Figure 106. scene2_g example.
test_preview_num_faces
Tests face detection with increased skin tone diversity in face scenes.
APIs tested:
-
android.hardware.camera2.CaptureResult#STATISTICS_FACES -
android.hardware.camera2.CaptureResult#STATISTICS_FACE_DETECT_MODE
Pass: Finds three faces with face landmarks in the face bounding boxes.
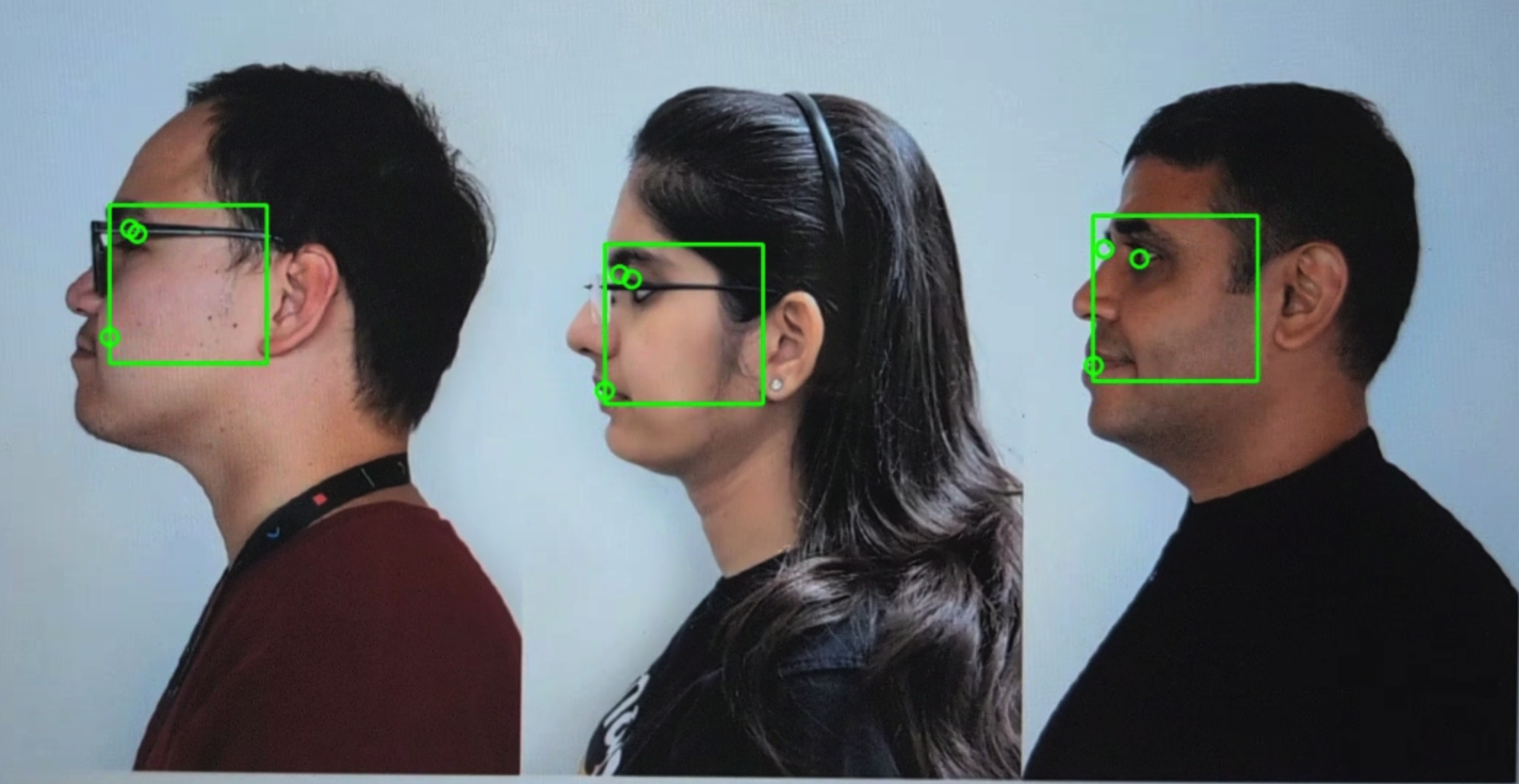
Figure 107. test_preview_num_faces example.
scene3
scene3 uses the ISO12233 chart, and most tests use a chart extractor method to find the chart in the scene. For this reason, most of the saved images don't have borders like the images for scenes 1, 2, or 4, but only the chart. The chart must be in the correct orientation for the chart finder to work optimally.
test_edge_enhancement
Tests that the android.edge.mode parameter is applied correctly. Captures non-reprocess images for each edge mode and returns sharpness of the output image and the capture result metadata. Processes a capture request with a given edge mode, sensitivity, exposure time, focus distance, and output surface parameter.
Pass: HQ mode (2) sharper than OFF mode (0). FAST mode (1) sharper than OFF mode. HQ mode sharper or equal to FAST mode.
APIs tested:
Impacted camera parameters:
-
EDGE_MODE
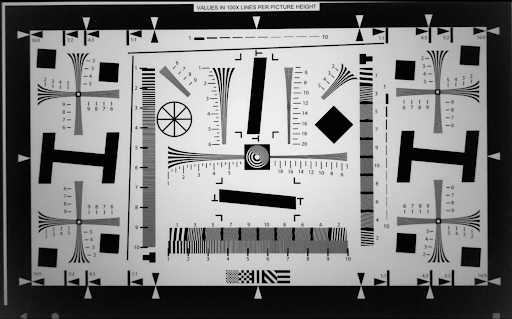
Figure 108. test_edge_enhancement edge=0 example.
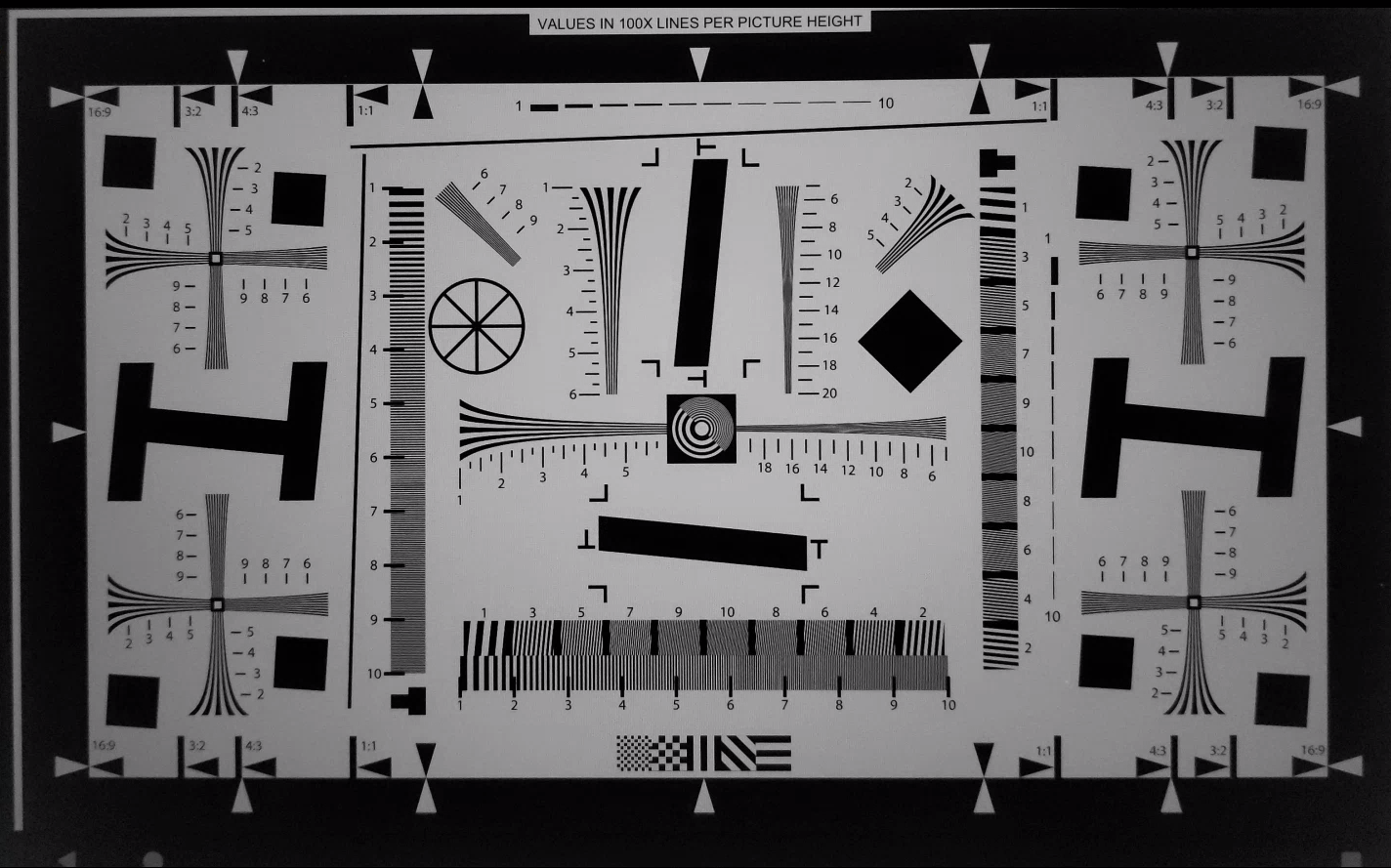
Figure 109. test_edge_enhancement edge=1 (fast mode) example.
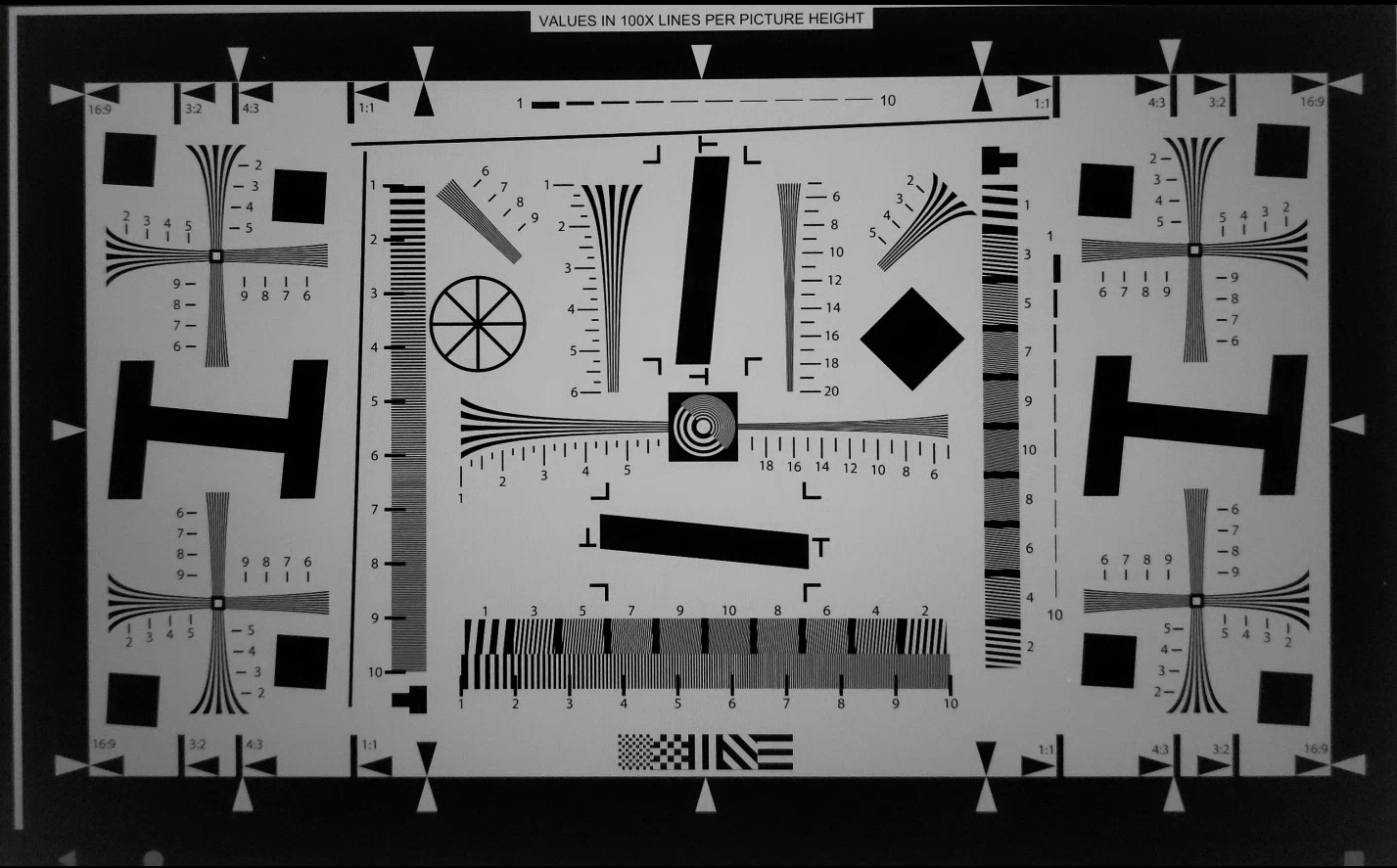
Figure 110. test_edge_enhancement edge=2 (high quality mode) example.
test_flip_mirror
Tests if the image is properly oriented as per 7.5.2 Front-Facing Camera in the CDD.
Mirrored, flipped, or rotated images can be identified by the diamond feature near the center.
Pass: Image isn't flipped, mirrored, or rotated.

Figure 111. test_flip_mirror scene patch example.
test_imu_drift
Tests if the inertial measurement unit (IMU) has stable output for 30 seconds while the device is stationary and capturing a high-definition preview.
APIs tested:
-
android.hardware.Sensor -
android.hardware.SensorEvent -
android.hardware.Sensor#TYPE_GYROSCOPE -
android.hardware.Sensor#TYPE_ROTATION_VECTOR
পাস:
- The drift of the gyroscope is less than 0.01 rad over the test time.
- The variance of the gyroscope reading is less than 1E-7 rad 2 /s 2 /Hz over the test time.
- The drift of the rotation vector is less than 0.01 rad over the test time.
- (Not yet mandated) The drift of the gyroscope is less than 1 degree per second.
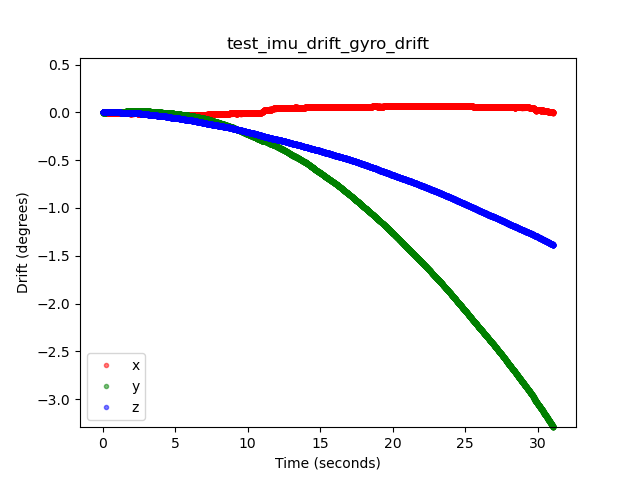
Figure 112. test_imu_drift gyroscope drift example.

Figure 113. test_imu_drift rotation vector drift example.
test_landscape_to_portrait
Tests if the landscape-to-portrait override functions correctly for landscape-oriented sensors.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#SCALER_AVAILABLE_ROTATE_AND_CROP_MODES -
android.hardware.camera2.CameraCharacteristics#SENSOR_ORIENTATION -
android.hardware.camera2.CameraCharacteristics#getCameraCharacteristics
Pass: The test locates a chart with the expected rotation (0 degrees when the landscape-to-portrait override is disabled, 90 degrees when enabled).

Figure 114. test_landscape_to_portrait example.
test_lens_movement_reporting
Tests if the lens movement flag is properly reported. Captures a burst of 24 images with the first 12 frames at the optimum focus distance (as found by 3A) and the last 12 frames at the minimum focus distance. Around frame 12, the lens moves causing the sharpness to drop. The sharpness eventually stabilizes as the lens moves to the final position.
The lens movement flag should be asserted in all frames where the sharpness is intermediate to sharpness in the first few frames with the lens stationary at optimum focal distance, and the final few frames where the lens is stationary in the minimum focal distance. The exact frame the lens moves isn't important: what is important is that the movement flag is asserted when the lens is moving.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#LENS_INFO_MINIMUM_FOCUS_DISTANCE -
android.hardware.camera2.CaptureResult#LENS_STATE -
android.hardware.camera2.CaptureResult#LENS_FOCUS_DISTANCE -
android.hardware.camera2.CaptureResult#SENSOR_TIMESTAMP -
android.hardware.camera2.CaptureRequest#LENS_FOCUS_DISTANCE
Pass: Lens movement flag is True in the frame with sharpness change.
Fail mechanisms:
-
lens_moving: True(android.hardware.camera2.CaptureResult#LENS_STATE= 1) intest_log.DEBUGis asserted only in frames where sharpness isn't changing. - Frames with
lens_moving: False(android.hardware.camera2.CaptureResult#LENS_STATE= 0) intest_log.DEBUGhas a sharpness difference compared to the first few frames at optimum focal distance or the last few frames at minimum focus distance.
test_reprocess_edge_enhancement
Tests if supported reprocess methods for edge enhancement work properly. Processes a capture request with a given reprocess edge mode and compares different modes to capture with reprocess edge modes disabled.
APIs tested:
-
android.hardware.camera2.CaptureRequest#EDGE_MODE -
android.hardware.camera2.CaptureRequest#REPROCESS_EFFECTIVE_EXPOSURE_FACTOR
Pass: Sharpness for the different edge modes is correct. HQ (mode 2) is sharper than OFF (mode 0), and improvement between different modes is similar.

Figure 115. test_reprocess_edge_enhancement plot example.
scene4
scene4 consists of a black circle on a white background inside a square.
Tests in scene4 can be sensitive to alignment, so starting in Android 15, you can use check_alignment.py in the tools directory to enable a check of the DUT and chart alignment.
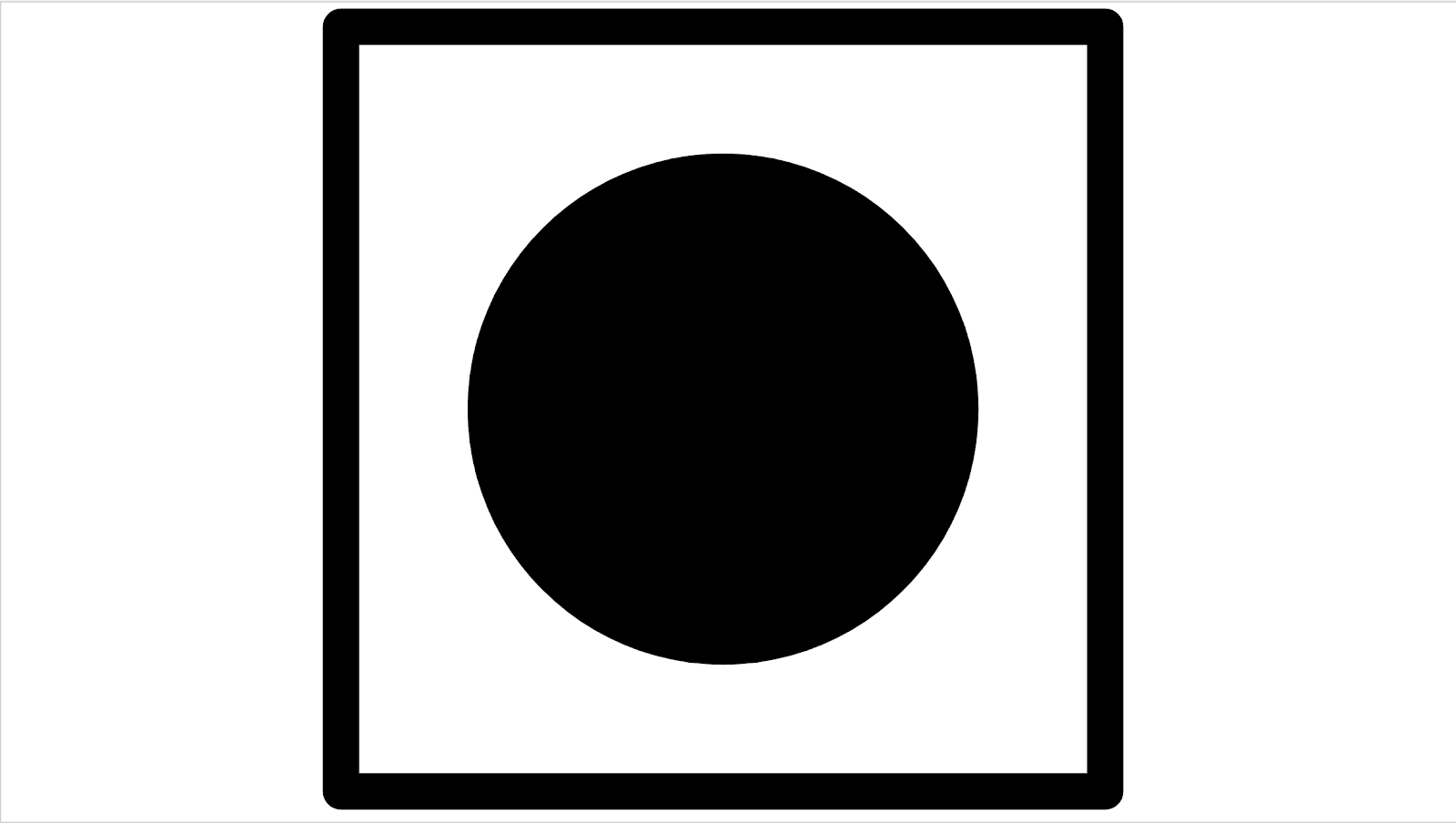
Figure 116. scene4 example.
test_30_60fps_preview_fov_match
Tests that 30 FPS and 60 FPS preview videos have the same FoV. The test captures two videos, one with 30 FPS and another with 60 FPS. A representative frame is selected from each video and analyzed to verify that the FoV changes in the two videos are within specifications. Tests that the circle's aspect ratio remains constant, the center of the circle remains stable, and the radius of the circle remains constant.
APIs tested:
-
android.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGE -
android.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATION -
android.hardware.camera2.CaptureRequest#SENSOR_EXPOSURE_TIME -
android.hardware.camera2.CaptureResult#LENS_DISTORTION -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH -
android.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION
Pass: Images aren't stretched, the center of images don't differ by more than 3%, and the maximum aspect ratio change between 30 FPS and 60 FPS videos is no more than 7.5%
Fail mechanisms:
- The circle from the 30 FPS video is significantly different in size from the 60 FPS video.
- The circle in the captured image is distorted by the processing pipeline.
- The circle in the captured image is cropped due to an extreme aspect ratio capture request reducing the height or width of the image.
- The circle in the captured image has a reflection in the center and doesn't appear fully filled.
test_aspect_ratio_and_crop
Tests if images are distorted or cropped unexpectedly in the image pipeline. Takes pictures of a circle over all formats. Verifies the circle isn't distorted, the circle doesn't move from the center of image, and the circle doesn't change size incorrectly with different aspect ratios or resolutions.
APIs tested:
-
android.hardware.camera2.CaptureResult#LENS_DISTORTION -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH -
android.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION
Pass: Images aren't stretched, the center of images don't differ by more than 3%, and the maximum possible FoV is preserved.
Fail mechanisms:
- The camera isn't aligned with the circle displayed on the tablet in the center of the captured scene.
- The circle in the captured image is distorted by the processing pipeline.
- The lower resolution image is double cropped in the image pipeline creating different FoV between high and low resolution images.
- The circle in the captured image is cropped due to an extreme aspect ratio capture request reducing the height or width of the image.
- The circle in the captured image has a reflection in the center and doesn't appear fully filled.
test_multi_camera_alignment
Tests the camera calibration parameters related to camera positioning for multi-camera systems. Using the multi-camera physical subcameras, takes a picture with one of the physical cameras. Finds the circle center. Projects the circle center to the world coordinates for each camera. Compares the difference between the cameras' circle centers in world coordinates. Reprojects the world coordinate back to pixel coordinates and compares against originals as a validity check. Compares the circle sizes checking if the focal lengths of the cameras are different.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds() -
android.hardware.camera2.CameraCharacteristics#LENS_DISTORTION -
android.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHS -
android.hardware.camera2.CameraCharacteristics#LENS_INTRINSIC_CALIBRATION -
android.hardware.camera2.CameraCharacteristics#LENS_POSE_ROTATION -
android.hardware.camera2.CameraCharacteristics#LENS_POSE_TRANSLATION -
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_LOGICAL_MULTI_CAMERA -
android.hardware.camera2.CaptureRequest#SCALER_CROP_REGION -
android.hardware.camera2.CaptureRequest#DISTORTION_CORRECTION_MODE
Pass: Circle centers and sizes are as expected in projected images compared to captured images using camera calibration data and focal lengths.
Fail mechanisms:
-
LENS_INTRINSIC_CALIBRATION,LENS_POSE_TRANSLATION, andLENS_POSE_ROTATIONare design values and not actual calibration data. - The camera system isn't appropriate for the test setup, for example, testing a wide and an ultra-wide camera system with the RFoV test rig. For more information, see Camera ITS-in-a-box FAQ Q1 .
test_preview_aspect_ratio_and_crop
Similar to the test_aspect_ratio_and_crop test for still captures, checks the supported preview formats to verify that the preview frames aren't stretched or cropped inappropriately. Verifies that the aspect ratio of the circle doesn't change, the cropped images keep the circle in center of the frame, and the circle size doesn't change for a constant format or with different resolutions (FoV check).
APIs tested:
-
android.hardware.camera2.CaptureResult#LENS_DISTORTION -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH -
android.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION -
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.media.MediaRecorder -
android.media.CamcorderProfile
Pass: Images aren't stretched, the center of images don't differ by more than 3%, and the maximum possible FoV is preserved.
test_preview_stabilization_fov
Checks the supported preview sizes to help ensure the FoV is cropped appropriately. The test captures two videos, one with preview stabilization ON , and another with preview stabilization OFF . A representative frame is selected from each video, and analyzed to verify that the FoV changes in the two videos are within spec.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.media.MediaRecorder -
android.media.CamcorderProfile
Pass: The circle aspect ratio remains about constant, the center location of the circle remains stable, and the size of circle changes no more than 20%.
test_video_aspect_ratio_and_crop
Takes videos of a circle inside of a square over all video formats. Extracts the key frames, and verifies the aspect ratio of the circle doesn't change, the cropped images keep the circle in center, and the circle size doesn't change for a constant format or with different resolution (FoV check).
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.hardware.camera2.CaptureResult#LENS_DISTORTION -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH -
android.hardware.camera2.CaptureResult#LENS_INTRINSIC_CALIBRATION -
android.media.MediaRecorder -
android.media.CamcorderProfile
Pass: Video frames aren't stretched, the center of frames don't differ by more than 3%, and the maximum possible FoV is preserved.
scene5
scene5 requires a uniformly lit gray scene. This is accomplished by a diffuser placed over the camera lens. We recommend the following diffuser: www.edmundoptics.com/optics/window-diffusers/optical-diffusers/opal-diffusing-glass/46168 .
To prepare the scene, attach a diffuser in front of the camera and point the camera to a lighting source of around 2000 lux. Images captured for scene5 require diffuse lighting with no features evident. The following is a sample image:
Figure 117. scene5 capture example.
test_lens_shading_and_color_uniformity
Tests that the lens shading correction is applied appropriately, and color of a monochrome uniform scene is evenly distributed. Performs this test on a YUV frame with auto 3A. Lens shading is evaluated based on the y channel. Measures the average y value for each sample block specified, and determines pass or fail by comparing with the center y value. The color uniformity test is evaluated in red-green and blue-green space.
APIs tested:
-
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODE -
android.hardware.camera2.CaptureRequest#CONTROL_AWB_MODE
Pass: At the specified radius of the image, the variance of red-green and blue-green value must be less than 20% to pass the test.
scene6
scene6 is a grid of uniquely identifiable ArUco markers. Tests in scene6 can be sensitive to alignment, so starting in 15, you can use check_alignment.py in the tools directory to enable a check of the DUT and chart alignment.
Figure 118. scene6 example.
test_in_sensor_zoom
Tests the behavior of the camera in-sensor zoom feature, which produces cropped raw images.
With the stream use case set to CROPPED_RAW , the test takes two captures over the zoom range, a full FoV raw image and a cropped raw image. The test converts the images to RGB arrays, downscales the full-sized cropped raw image to the size reported by SCALER_RAW_CROP_REGION , and calculates the 3D RMS difference between the two images.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.hardware.camera2.CameraMetadata#SCALER_AVAILABLE_STREAM_USE_CASES_CROPPED_RAW -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CaptureResult#SCALER_RAW_CROP_REGION
Pass: The 3D RMS difference between the downscaled cropped raw image and the full FoV raw image is less than the threshold set in the test.
test_zoom
Tests the camera zoom behavior from the ultrawide lens to the wide lens. Takes captures over the zoom range and checks if the ArUco markers get bigger as the camera zooms in. The test also checks if the center marker's position changes predictably over each capture. The distance from the center marker's center to the image center can either change at a constant rate with respect to the zoom ratio until a physical camera switch, or it can change monotonically towards the location of the same marker after a physical camera switch. The Jetpack Camera App ( JCA ) must be installed on the device before testing.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHS -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Pass: Relative size of captured ArUco marker is accurate against requested zoom ratio to verify that the camera is zooming correctly, and marker distance to the image center changes according to the criteria stated in the test description.
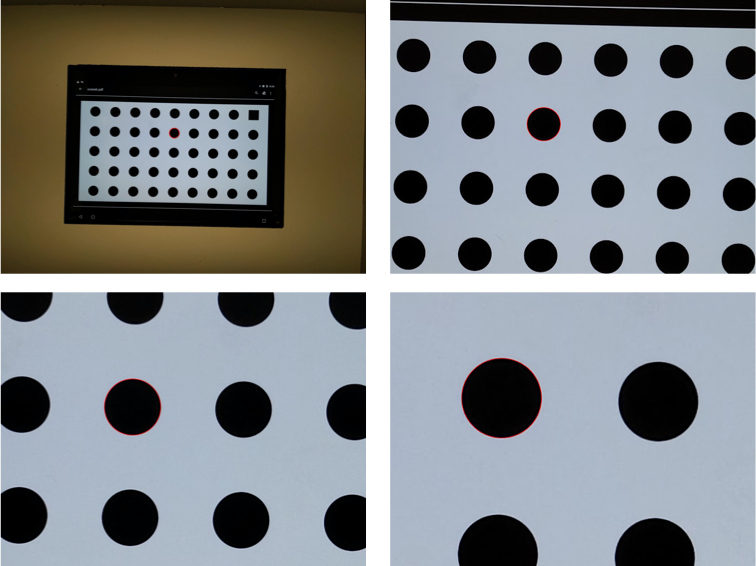
Figure 119. test_zoom to find the contour of the ArUco marker closest to the center.
test_low_latency_zoom
Tests the camera low latency zoom behavior. Takes captures over the zoom range with android.control.settingsOverride = 1 (SETTINGS_OVERRIDE_ZOOM) , and checks if the markers in the output images match the zoom ratios in the capture metadata. The same camera capture session is used to converge 3A and take captures.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_AVAILABLE_SETTINGS_OVERRIDES -
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CaptureRequest#CONTROL_SETTINGS_OVERRIDE -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CaptureResult#CONTROL_SETTINGS_OVERRIDE
Pass: Relative size of captured marker is accurate against the zoom ratio result metadata.
test_preview_video_zoom_match
Tests that while recording and zooming, video preview and video output display and record the same output. Calculates the size of the marker closest to the center at different zoom ratios and checks whether the size of the marker increases as the zoom ratio increases.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHS -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Pass: Relative size of captured marker is accurate against requested zoom ratio in video and preview.
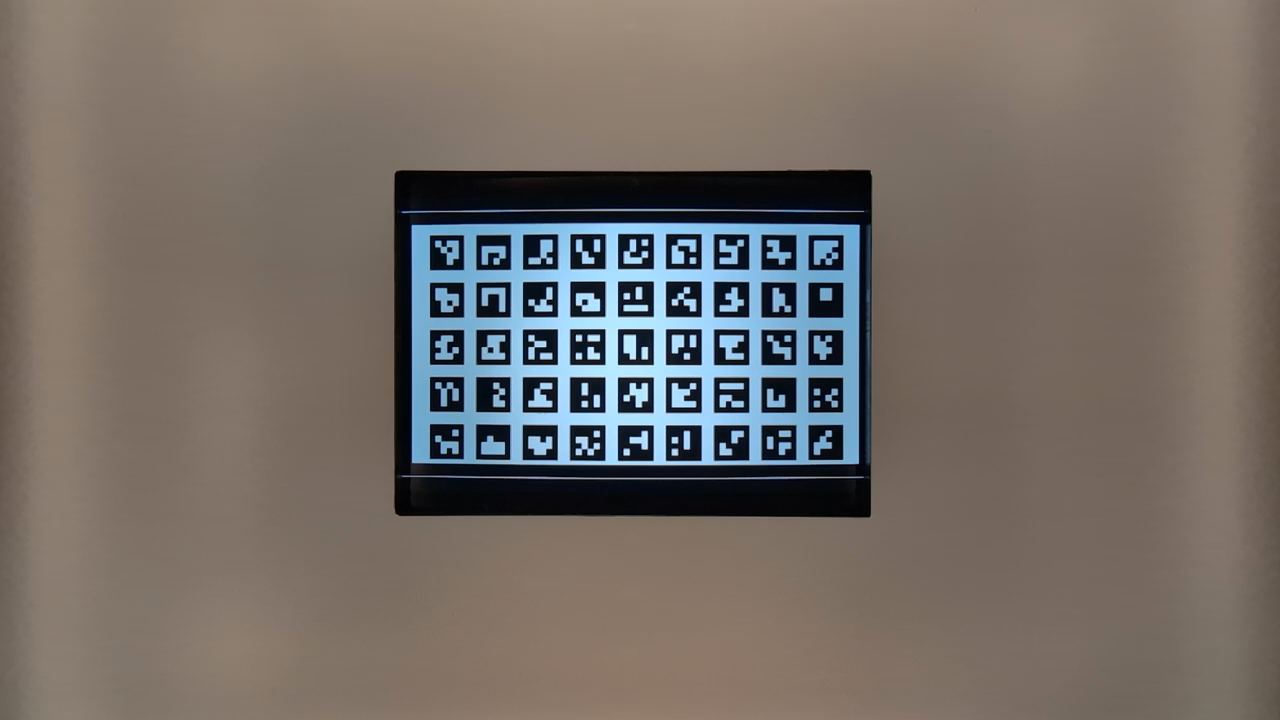
Figure 120. HD_1280x720_key_frame.png (before zoom).
Figure 121. preview_1280x720_key_frame.png (before zoom).
Figure 122. HD_1280x720_key_frame.png (after zoom).

Figure 123. preview_1280x720_key_frame.png (after zoom).
test_preview_zoom
Tests that the zoom ratio of each preview frame matches the corresponding capture metadata from the ultrawide lens to the wide lens. The test takes preview frames over the zoom range and finds the ArUco marker closest to the center. The test then checks if the center marker's position changes predictably over each capture. The distance from the center marker's center to the image center can either change at a constant rate with respect to the zoom ratio until a physical camera switch, or it can change monotonically towards the location of the same marker after a physical camera switch.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHS -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Pass: The relative size of the selected ArUco marker is accurate for the reported zoom ratio of the corresponding capture result for all of the preview frames. The relative distance of the selected marker from the center of the image is accurate for the reported zoom ratio of the corresponding capture result of all the preview frames.
Figure 124. test_preview_zoom images showing selected marker closest to the center
test_session_characteristics_zoom
Tests the zoom ratio range for all supported session configurations listed in CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSION . For each of those configurations, if CameraDeviceSetup#isSessionConfigurationSupported returns true , the test verifies that the zoom ratio range returned in CameraDeviceSetup#getSessionCharacteristics can be reached.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSION -
android.hardware.camera2.CameraDevice.CameraDeviceSetup#isSessionConfigurationSupported -
android.hardware.camera2.CameraDevice.CameraDeviceSetup#getSessionCharacteristics
Pass: Both the minimum and maximum zoom ratios can be reached for each supported SessionConfiguration listed in CameraCharacteristics#INFO_SESSION_CONFIGURATION_QUERY_VERSION .
দৃশ্য7
scene7 is a rectangular frame divided into four equal quadrants, each filled with a different color. In the center of the rectangle is a slanted edge chart for sharpness checks. Four ArUco markers are aligned with the four outer corners of the rectangle to assist in obtaining accurate coordinates of the main rectangle frame at varying zoom ratios.
Figure 125. scene7.
test_multi_camera_switch
This test verifies that during preview recording at varying zoom ratios, the switch between the ultrawide (UW) and wide (W) lenses results in similar RGB values.
The test uses different zoom ratios within the predefined range to perform a dynamic preview recording and identify the point at which the physical camera changes. This point marks the crossover from the UW to the W lens.
The frames captured at and before the crossover point are analyzed for auto exposure (AE), auto white balance (AWB), and autofocus (AF).
The AE check verifies that the luma change is within the expected range for both UW and W lens images. The AWB check verifies that the ratios of red-green and blue-green are within threshold values for both UW and W lens images. The AF check evaluates the sharpness estimation value based on the average gradient magnitude between UW and W lens images.
While executing this test if the Moire effect interferes with the results, use a higher resolution tablet from the list of Camera ITS approved list of tablets .
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.media.CamcorderProfile -
android.media.MediaRecorder
Pass: For the test to pass, the AE and AWB checks must pass. The AF check results are only used for logging purposes. The following are the criteria for each check:
- AE check: The luma change (Y value) between the UW and W lens images must be less than 4% for all the color patches if the device supports both
ae_regionsandawb_regions. If onlyae_regionsis supported then only the gray color patch values must meet the criteria. - AWB check: The difference between the red-green and blue-green values for the UW and W lens images must be less than 3% for the gray color patch and must be less than 10% for other color patches if the device supports both
ae_regionsandawb_regions. - AF check: The image sharpness for the W lens capture must be higher than the sharpness with the UW capture.

Figure 126. Gray patch taken with UW lens.

Figure 127. Gray patch taken with W lens.
scene8
scene8 is a rectangular frame divided into four equal regions, each containing a portrait taken with a different exposure or overlaid with a different color shade (blue shade, increased exposure, decreased exposure, yellow shade). Four ArUco markers are aligned with the four outer corners of the rectangle to obtain accurate coordinates of the main rectangle frame.

Figure 128. scene8 example.
test_ae_awb_regions
Tests that the RGB and luma values differ when preview recording at different AE and AWB regions.
The test records an 8 second preview recording, performing AE and AWB metering on each quadrant for 2 seconds each. The test then extracts a frame from each region's preview recording, and uses the extracted frames to perform the following AE and AWB checks:
- AE check: Verifies that the frame metering the region with decreased exposure has an increased luma value of more than 1% than the frame metering the region with increased exposure. This verifies that images are brightened when metering a dark region.
- AWB check: Verifies that the ratio of red to blue (of the image's average RGB values) in the frame with the blue metering region is more than 2% higher than the frame with the yellow metering region. This verifies that images have a balanced RGB value when metering a yellow (warm) or blue (cool) region.
APIs tested:
-
android.hardware.camera2.CaptureRequest#CONTROL_AWB_REGIONS -
android.hardware.camera2.CaptureRequest#CONTROL_AE_REGIONS -
android.hardware.camera2.CameraCharacteristics#CONTROL_MAX_REGIONS_AE -
android.hardware.camera2.CameraCharacteristics#CONTROL_MAX_REGIONS_AWB
Pass: The AE and AWB checks both pass.

Figure 129. Frame metering dark region with increased exposure.

Figure 130. Frame metering lighter region with decreased exposure.
Fail mechanisms:
Accurate detection of all four ArUco markers is essential for this test. If the initial detection fails, the system attempts a second detection pass using a black and white version of the image. The following grayscale image represents the secondary processing step:
Figure 131. ArUco markers misalignment.
test_color_correction_mode_cct
Tests COLOR_CORRECTION_MODE across different color temperatures and tints, verifying changes in RGB ratios against the capture scene, scene8 .
APIs tested:
-
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_MODE -
android.hardware.camera2.CaptureResult#COLOR_CORRECTION_MODE -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_COLOR_TEMPERATURE -
android.hardware.camera2.CaptureResult#COLOR_CORRECTION_COLOR_TEMPERATURE -
android.hardware.camera2.CaptureRequest#COLOR_CORRECTION_COLOR_TINT -
android.hardware.camera2.CaptureResult#COLOR_CORRECTION_COLOR_TINT -
android.hardware.camera2.CameraCharacteristics#COLOR_CORRECTION_COLOR_TEMPERATURE_RANGE -
android.hardware.camera2.CameraMetadata#COLOR_CORRECTION_MODE_CCT -
android.hardware.camera2.CameraCharacteristics#COLOR_CORRECTION_AVAILABLE_ABERRATION_MODES
Pass: RGB ratios exhibit the anticipated increases or decreases relative to the selected color temperatures and tints.
Test skip criteria
The test_color_correction_mode_cct test is skipped if any of the following criteria are met:
- The device has a first API level (
first_api_level) of 35 or lower. - The device doesn't advertise
COLOR_CORRECTION_MODE_CCTinCOLOR_CORRECTION_AVAILABLE_ABERRATION_MODES.
scene9
scene9 consists of thousands of randomly sized and colored circles to create a scene with very low repeatability to stress JPEG compression algorithms.
Figure 132. scene9 example.
test_jpeg_high_entropy
Tests that camera JPEG compression works on scene9 with high entropy and the JPEG quality factor set to 100%. The zoom factor is increased to verify that the scene displayed on the tablet fills the camera FoV.
APIs tested:
Pass: JPEG file is compressed properly, written, and read back from disk.
test_jpeg_quality
Tests the camera JPEG compression quality. Step JPEG qualities through android.jpeg.quality and verifies that the quantization tables change correctly.
APIs tested:
Pass: Quantization matrix decreases with quality increase. (The matrix represents the division factor.)
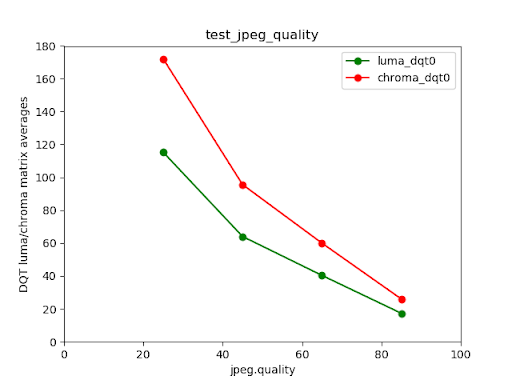
Figure 133. Pixel 4 rear camera luma and chroma DQT matrix averages versus JPEG quality.
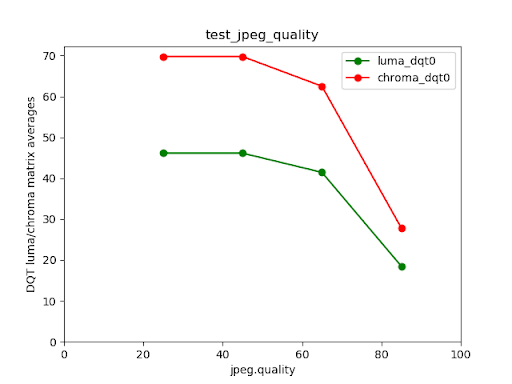
Figure 134. Failed test example.
scene_video
scene_video is a video scene consisting of four different colored circles moving back and forth at different frame rates against a white background.
Figure 135. scene_video example.
test_preview_frame_drop
Tests that the requested preview frame rate is maintained with a dynamic scene. This test runs on all cameras that are exposed to third-party apps.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_TARGET_FPS_RANGES -
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.hardware.camera2.CaptureResult#CONTROL_AE_TARGET_FPS_RANGE -
android.media.CamcorderProfile -
android.media.MediaRecorder
Pass: The preview frame rate is at the maximum of the requested frame rate range, and the average variation between consecutive frames is less than the relative tolerance set in the test.
scene_extensions
The scene_extensions tests are for camera extensions and must use Camera ITS-in-a-Box , as they require precise control of the testing environment. Additionally, all light leakage must be controlled. This might require covering the test rig, DUT, and tablet with a drop cloth as well as eliminating light leakage from the front screen of the DUT.
scene_hdr
The scene_hdr scene consists of a portrait on the left and a low-contrast QR code on the right.
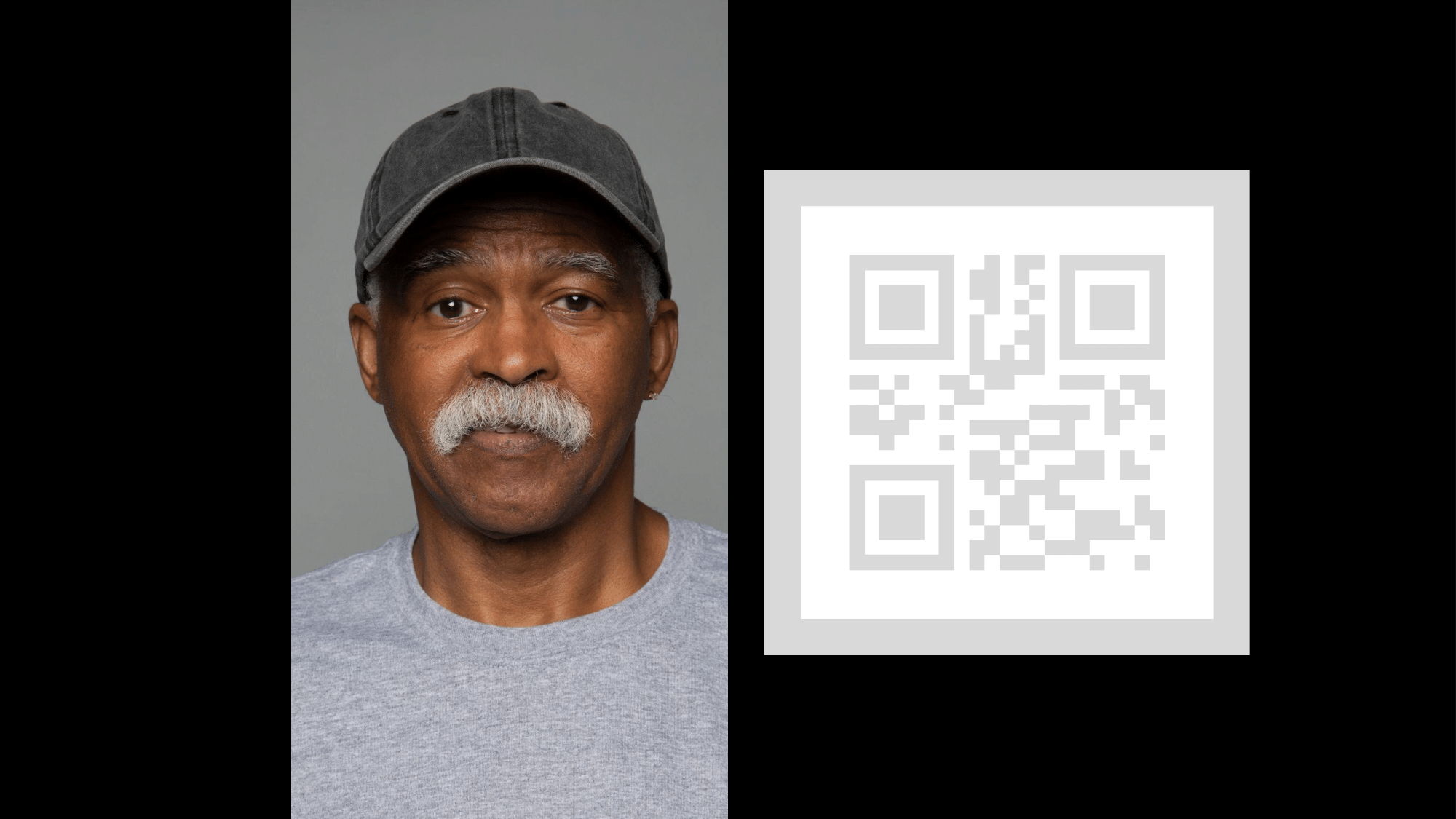
Figure 136. scene_hdr example.
test_hdr_extension
Tests the HDR extension . Takes captures with and without the extension enabled, and checks if the extension makes the QR code more detectable.
APIs tested:
-
android.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensions -
android.hardware.camera2.CameraExtensionSession#capture
Pass: The HDR extension reduces the number of contrast changes needed to detect the QR code or reduces the gradient across the QR code.
scene_low_light
The scene_low_light scene consists of a grid of squares of varying shades of gray against a black background and the grid of squares are bound by a red outline. The squares are arranged in a Hilbert curve orientation.
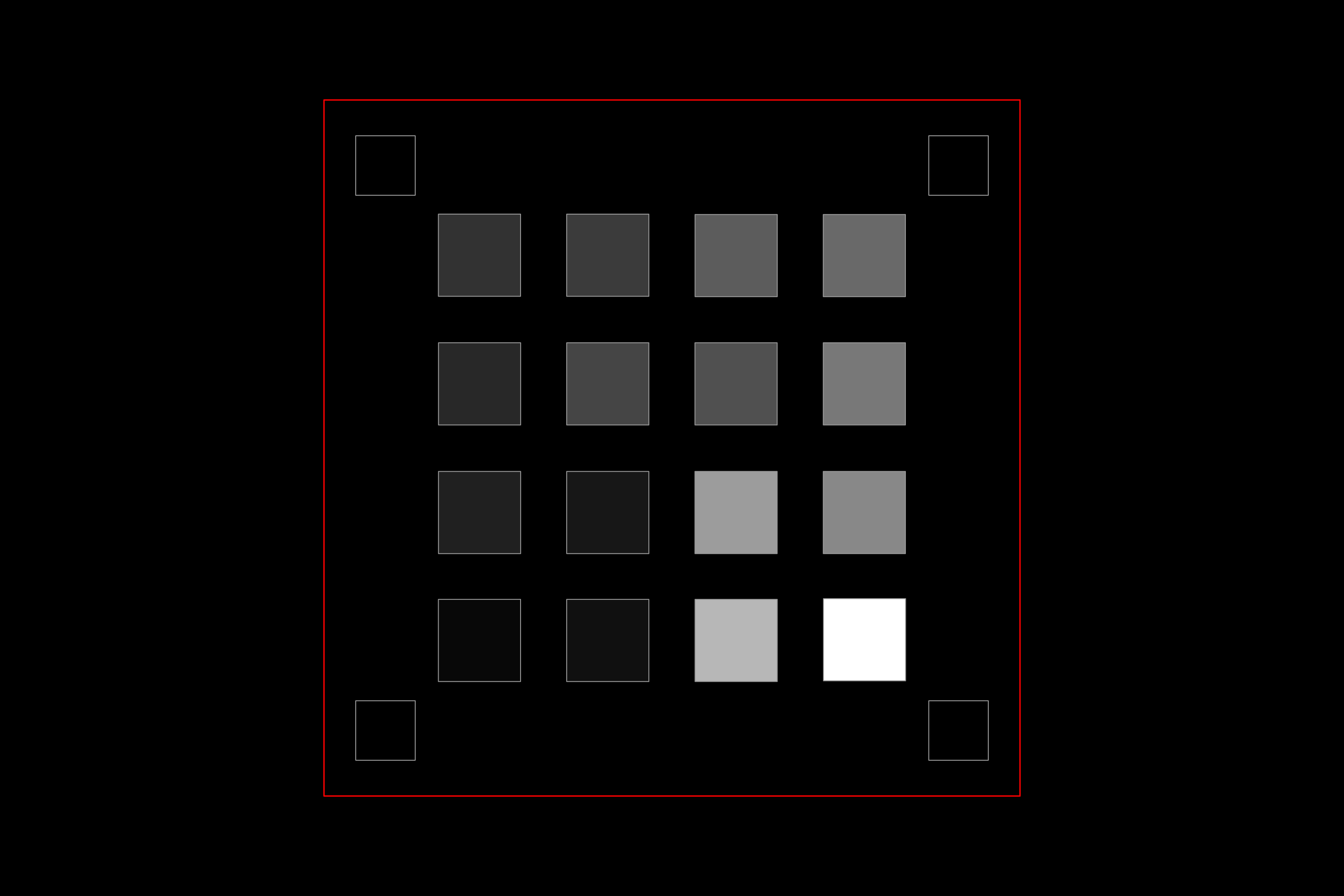
Figure 137. scene_low_light example.
test_night_extension
Tests the Night extension . Takes captures with the extension enabled, and performs the following:
- Detects the presence of 20 squares
- Computes the luma bounded by each square
- Computes the average luma value of the first 6 squares according to the Hilbert curve grid orientation
- Computes the difference in luma value of consecutive squares (for example, square2 - square1) up to squares 5 and 6 (square6 - square5), and finds the average of the five computed differences.
For devices running Android 16 or higher, the capture request includes a metered region corresponding to the rectangle bounding the grid of squares. This addition changes the threshold pass criteria.
APIs tested:
-
android.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensions -
android.hardware.camera2.CameraExtensionSession#capture
পাস:
- For devices running Android 16 or higher, the average luma value of the first 6 squares must be at least 80, and the average difference in luma value of consecutive squares up to squares 5 and 6 must be at least 18.75.
- For devices running Android 15 and lower, the average luma value of the first 6 squares must be at least 85, and the average difference in luma value of consecutive squares up to squares 5 and 6 must be at least 17.
The following luminance plot shows what a passing test result looks like.

Figure 138. Low light night scene passing test example.
test_low_light_boost_extension
Tests the Low Light Boost AE mode . If Camera2 supports low light boost AE mode, then this test is performed for Camera2. If the night mode camera extension is supported and the extension supports low light boost AE mode, then this test is also performed for the night mode camera extension. This test sets the AE mode to low light boost, takes a frame from the preview, and performs the following:
- Detects the presence of 20 boxes
- Computes the luma bounded by each box
- Computes the average luma value of the first 6 squares according to the Hilbert curve grid orientation
- Computes the difference in luma value of consecutive squares (for example, square2 - square1) up to squares 5 and 6 (square6 - square5), and finds the average of the five computed differences.
For devices running Android 16 or higher, the capture request includes a metered region corresponding to the rectangle bounding the grid of squares. This addition changes the threshold pass criteria.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics.CONTROL_AE_AVAILABLE_MODES -
android.hardware.camera2.CameraMetadata#CONTROL_AE_MODE_ON_LOW_LIGHT_BOOST_BRIGHTNESS_PRIORITY -
android.hardware.camera2.CameraExtensionCharacteristics#getSupportedExtensions
পাস:
For devices running Android 16 or higher, the average luma value of the first 6 squares must be at least 54, and the average difference in luma value of consecutive squares up to squares 5 and 6 must be at least 17.
For devices running Android 15 and lower, the average luma value of the first 6 squares must be at least 70, and the average difference in luma value of consecutive squares up to squares 5 and 6 must be at least 18.
scene_tele
A key requirement for scene_tele tests is that the chart distance must be at least the minimum focus distance of the telephoto lens. As this minimum focus distance can differ between devices, you must configure your setup to suit the specific telephoto camera.
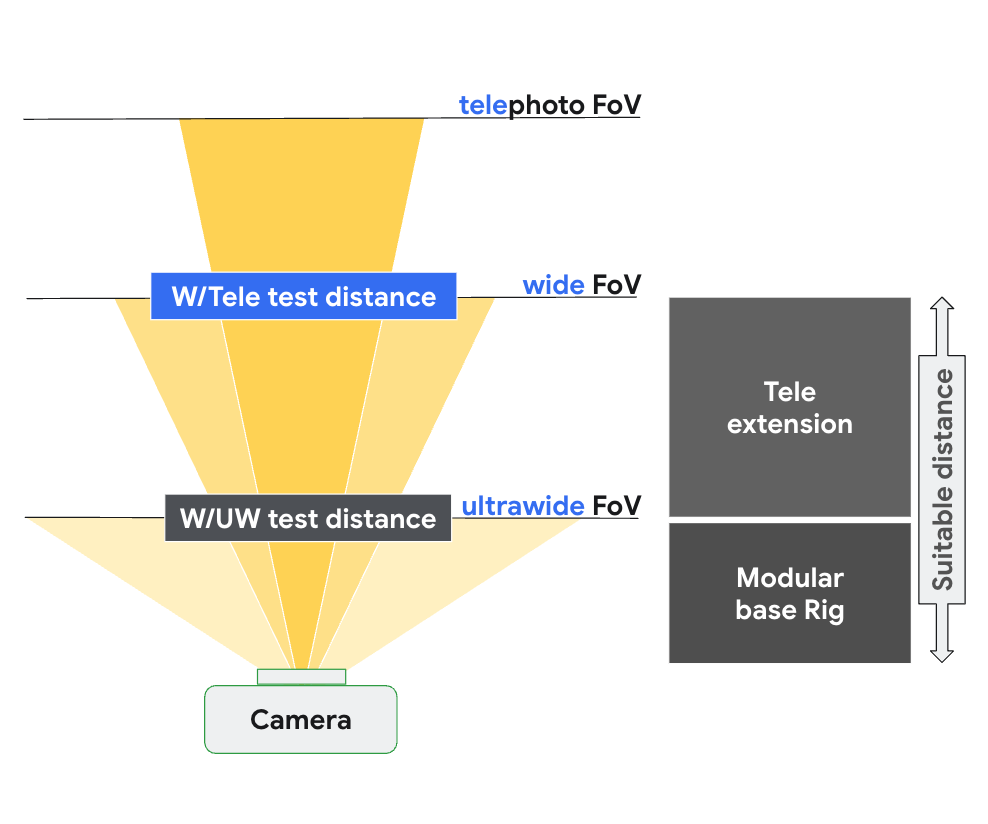
Figure 139. scene_tele setup based on focus distance of wide and tele camera.
For more information on test hardware setup, see Tele extension rig setup .
scene6_tele
The scene6_tele scene consists of a grid of ArUco markers on a white background.
If scene6_tele captures look overexposed in the modular rig , remove the front plate of the modular rig .
Disconnect the WFoV test rig from the extension and remove the phone mount.

Figure 140. Disconnect the WFoV test rig from the extension and remove the phone mount.

Figure 141. Remove the front plate.
test_zoom_tele
Tests the camera zoom behavior from the wide lens to the telephoto lens. The test is identical to test_zoom , but tests the camera zoom behavior from the wide lens to the telephoto lens.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHS -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Pass: Relative size of captured ArUco marker is accurate against requested zoom ratio to verify that the camera is zooming correctly, and marker distance to the image center changes according to the criteria listed in test_zoom .
test_preview_zoom_tele
Tests the camera zoom behavior for preview frames from the wide lens to the telephoto lens. The test is identical to test_preview_zoom , but tests the camera zoom behavior for preview frames from the wide lens to the telephoto lens.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CameraCharacteristics#LENS_INFO_AVAILABLE_FOCAL_LENGTHS -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CaptureResult#LENS_FOCAL_LENGTH
Pass: Relative size of captured ArUco marker is accurate against requested zoom ratio to verify that the camera is zooming correctly, and marker distance to the image center changes according to the criteria listed in test_preview_zoom .
scene7_tele
scene7_tele is identical to scene7 , but set up for telephoto lens testing. It's a rectangular frame divided into four equal quadrants, each filled with a different color. In the center of the rectangle is a slanted edge chart for sharpness checks. Four ArUco markers are aligned with the four outer corners of the rectangle to assist in obtaining accurate coordinates of the main rectangle frame at varying zoom ratios.
test_multi_camera_switch_tele
This test verifies that during preview recording at varying zoom ratios, the switch between the wide (W) and telephoto (tele) lenses results in similar RGB values.
The test uses different zoom ratios within the predefined range to perform a dynamic preview recording and identify the point at which the physical camera changes. This point marks the crossover from the W to the tele lens.
The frames captured at and before the crossover point are analyzed for AE, AWB, and AF.
The AE check verifies that the luma change is within the expected range for both W and tele lens images. The AWB check verifies that the ratios of red-green and blue-green are within threshold values for both W and tele lens images. The AF check evaluates the sharpness estimation value based on the average gradient magnitude between W and tele lens images.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.media.CamcorderProfile -
android.media.MediaRecorder
Pass: For the test to pass, the AE, AWB, and AF checks must all pass. The following are the criteria for each check:
- AE check: The luma change between the W and tele lens images must be less than 4%.
- AWB check: In the LAB color space, the delta C between red-green and blue-green for wide and telephoto cannot exceed 10.
- AF check: The image sharpness of the tele lens must be higher than the W lens.
scene_flash
The scene_flash tests require a dark scene in the sensor fusion box.
test_auto_flash
Tests that auto-flash is triggered in a dark scene for rear-facing and front-facing cameras. For front-facing cameras, auto-flash uses the screen to illuminate the scene, not a physical flash unit. The test verifies that auto-flash is fired by checking that the center of the tile image is brighter with auto-flash enabled. To trigger auto-flash, the lights in the test rig must be turned off. The lights can be turned off automatically with the Arduino controller. The scene must be completely dark for the test to work correctly. The Jetpack Camera App ( JCA ) must be installed on the device before testing. Auto-flash for rear-facing cameras relies on the AE state to be triggered, but auto-flash for front-facing cameras doesn't rely on AE and is always triggered.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_AVAILABLE -
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODE -
android.hardware.camera2.CaptureRequest#CONTROL_AE_PRECAPTURE_TRIGGER -
android.hardware.camera2.CaptureResult#CONTROL_AE_STATE -
android.hardware.camera2.CaptureRequest#FLASH_MODE
Pass: The center of the tile image with auto-flash enabled is brighter than the original scene image for all cameras.
test_flash_strength
Tests that flash strength control in SINGLE mode is implemented correctly.
Verifies that if the device supports flash strength control during camera use in SINGLE mode, the flash strength changes with different requested strength levels. Verifies that flash strength control works with different AE_MODES . For example, if the auto-exposure mode is ON or OFF , the flash strength level has an effect on brightness, and if the mode is ON_AUTO_FLASH , the flash strength level has no effect on brightness.
To conduct the test, lights in the test rig must be turned off. The lights can be turned off automatically with the Arduino controller. The scene must be completely dark for the test to work correctly.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_DEFAULT_LEVEL -
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_MAXIMUM_LEVEL -
android.hardware.camera2.CameraCharacteristics#FLASH_SINGLE_STRENGTH_DEFAULT_LEVEL -
android.hardware.camera2.CameraCharacteristics#FLASH_SINGLE_STRENGTH_MAX_LEVEL
পাস:
When the auto-exposure mode is ON or OFF , the brightness of the image patches increases as the flash strength level increases from no flash to FLASH_SINGLE_STRENGTH_MAX_LEVEL . When the auto-exposure mode is ON_AUTO_FLASH , the difference in brightness of the image patches is within tolerance as the flash strength level increases from no flash to FLASH_SINGLE_STRENGTH_MAX_LEVEL .
test_led_snapshot
Tests that the LED snapshots don't saturate or tint the image.
This test adds a lighting controller to the Sensor Fusion Box to control the lights. With the lights set to OFF , the test takes a capture with the AUTO_FLASH mode set to ON . During this capture, the test runs a precapture sequence with the aePrecapture trigger set to START , and sets the capture intent to Preview to take the capture with flash.
Because the capture has a distinctive hotspot due to flash, the test computes the flash image mean of the entire capture and verifies whether the value is within the (68, 102) range. To check if the image is reasonably white balanced, the test calculates the red-green and blue-green ratios and verifies whether the ratios are within 0.95 and 1.05.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_AVAILABLE -
android.hardware.camera2.CaptureRequest#CONTROL_AE_MODE -
android.hardware.camera2.CaptureRequest#FLASH_MODE
Pass: The red-green and blue-green ratios are within 0.95 and 1.05. The flash image mean is within the (68, 102) range.
test_night_mode_indicator
Tests the functionality of the night mode indicator, a feature that indicates whether the camera is operating in low light conditions and will benefit from a Night Mode Camera extension still capture. This feature is available only on devices that support Night Mode Camera extensions.
This test checks that the night mode indicator correctly reflects the lighting conditions during camera preview. The test performs the following steps:
- Initialization: The test initializes an
ItsSessionand retrieves camera properties. It also establishes a connection with the lighting controller. - Skip Conditions: The test is skipped if the device doesn't support the required API level or the night mode indicator feature.
- Camera2 Session:
- The test starts a preview capture session using a
Camera2session. - The light is turned on and a preview frame is captured.
- The test verifies that the night mode indicator is in the
OFFstate. - The light is turned off and a preview frame is captured.
- The test verifies that the night mode indicator is in the
ONstate.
- The test starts a preview capture session using a
- Camera extension session:
- The test repeats the same procedure as for the
Camera2session, but using aCameraExtensionsession with theEXTENSION_NIGHTextension.
- The test repeats the same procedure as for the
- Cleanup: The test closes
ItsSessionand releases the lighting controller.
APIs tested:
পাস:
- When the light is on, the night mode indicator should be in the
OFFstate. - When the light is off, the night mode indicator should be in the
ONstate. - Applies to both
Camera2andCameraExtensionsessions.
test_preview_min_frame_rate
Tests that the preview frame rate decreases correctly in a dark scene. For this test to work correctly, the lights in the test rig must be turned off by the controller or manually by the test operator.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_AE_AVAILABLE_TARGET_FPS_RANGES -
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.hardware.camera2.CaptureResult#CONTROL_AE_TARGET_FPS_RANGE -
android.media.CamcorderProfile -
android.media.MediaRecorder
Pass: The preview frame rate is at the minimum of the requested frame rate range, and the variation between frames is less than the absolute tolerance set in the test.
test_torch_strength
Tests that flash strength control in TORCH mode is implemented correctly.
Verifies that if the device supports flash strength control during camera use in TORCH mode, the torch strength changes with different requested strength levels. Verifies that flash strength control works with different AE_MODES . For example, if the auto-exposure mode is ON or OFF , the flash strength level has an effect on brightness, and if the mode is ON_AUTO_FLASH , the flash strength level has no effect on brightness. Verifies that the torch strength stays the same throughout the duration of a burst, simulating a video capture session. To conduct the test, lights in the test rig must be turned off. The lights can be turned off automatically with the Arduino controller. The scene must be completely dark for the test to work correctly.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_DEFAULT_LEVEL -
android.hardware.camera2.CameraCharacteristics#FLASH_INFO_STRENGTH_MAXIMUM_LEVEL -
android.hardware.camera2.CameraCharacteristics#FLASH_TORCH_STRENGTH_DEFAULT_LEVEL -
android.hardware.camera2.CameraCharacteristics#FLASH_TORCH_STRENGTH_MAX_LEVEL
পাস:
When the auto-exposure mode is ON or OFF , the brightness of the image burst patches increases as the flash strength level increases from no flash to FLASH_TORCH_STRENGTH_MAX_LEVEL . When the auto-exposure mode is ON_AUTO_FLASH , the difference in brightness of the image burst patches are within tolerance as the flash strength level increases from no flash to FLASH_TORCH_STRENGTH_MAX_LEVEL .
sensor_fusion
Sensor fusion tests require specific phone movement in front of a checkerboard pattern and ArUco markers. For optimum results, verify that the test chart is mounted flat. Charts that aren't flat affect the rotation calculations for many of the tests. The chart must fill the back of the sensor fusion box by printing at 17x17 in. (43x43 cm). The sensor_fusion tests can be automated with the Sensor Fusion Box .
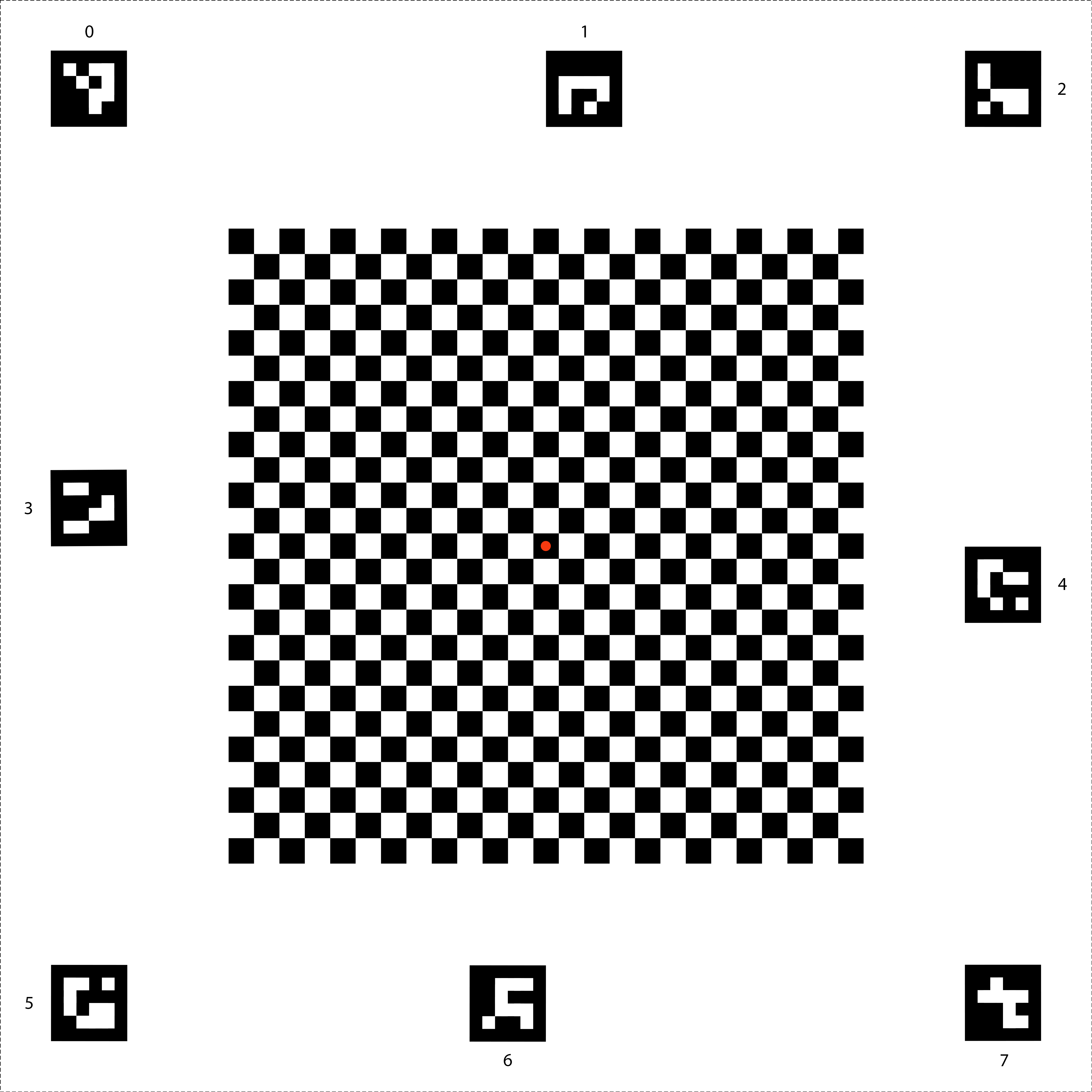
Figure 142. Sensor fusion chart.
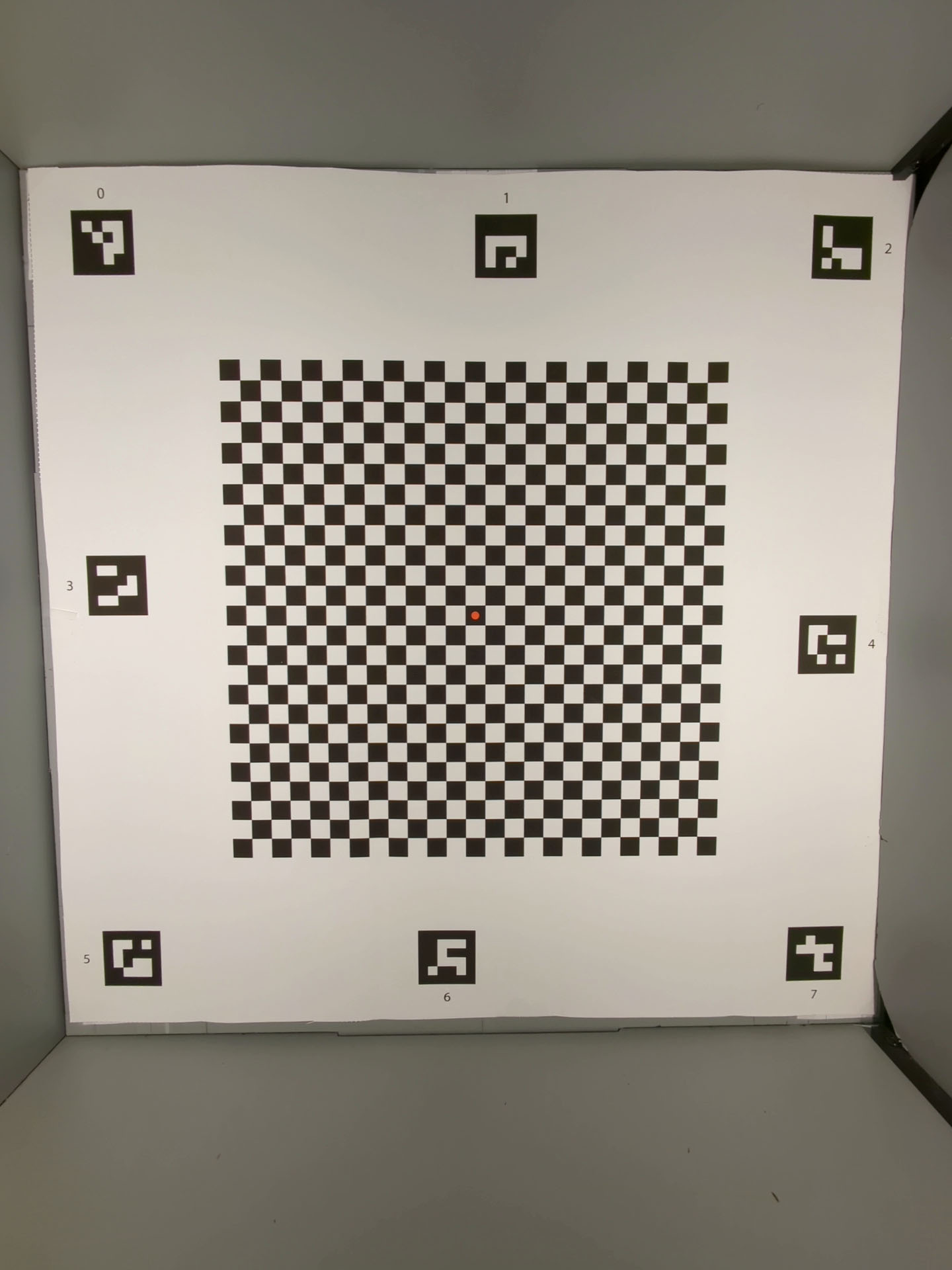
Figure 143. Sensor fusion chart that fills the back of the sensor fusion box.
test_lens_intrinsic_calibration
Tests that the optical center of the lens intrinsic changes when the lens moves due to optical image stabilization (OIS). If lens intrinsic samples are supported, tests that the optical center of the lens intrinsic samples changes when the lens moves due to OIS.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#LENS_INTRINSIC_CALIBRATION -
android.media.MediaRecorder -
android.media.CamcorderProfile
Pass: The optical center of the lens intrinsic changes by 1 pixel or more. If lens intrinsic samples are supported, the optical centers of the lens intrinsic samples change by 1 pixel or more.
The following figure is an example test_lens_intrinsic_calibration plot showing changes of principal points in pixels for each frame:

Figure 144. Example of test_lens_intrinsic_calibration plot showing changes of principal points in pixels for each frame.
test_multi_camera_frame_sync
Tests that frame timestamps captured by logical camera are within 10 ms by computing angles of squares within the checkerboard to determine the timestamp.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#LOGICAL_MULTI_CAMERA_SENSOR_SYNC_TYPE -
android.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds() -
android.hardware.camera2.CameraMetadata#REQUEST_AVAILABLE_CAPABILITIES_LOGICAL_MULTI_CAMERA -
android.hardware.camera2.params.OutputConfiguration#setPhysicalCameraId()
Pass: The angle between images from each camera doesn't change appreciably as the phone is rotated.
test_preview_distortion
Tests that distortion is corrected throughout each preview frame taken at various zoom levels. For each preview frame, the test calculates ideal points based on camera intrinsics and extrinsics.
In the example image, ideal points are shown in green; actual points are shown in red. The distortion error is calculated based on the RMS pixel distance between the actual points and ideal points. The green and red highlights on the image are used to visually detect the area of distortion error.

Figure 145. Image of checkerboard with ideal points as green and actual points as red.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#CONTROL_ZOOM_RATIO_RANGE -
android.hardware.camera2.CaptureRequest#CONTROL_ZOOM_RATIO -
android.hardware.camera2.CameraCharacteristics#getPhysicalCameraIds() -
android.media.CamcorderProfile -
android.media.MediaRecorder
Pass: The normalized distortion error of each preview frame is less than the threshold set in the test.
test_preview_stabilization
Tests that stabilized preview video rotates less than gyroscope.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.media.MediaRecorder -
android.media.CamcorderProfile
Pass: Maximum angle rotation over frames is less than 70% of gyroscope rotation.
The following are sample videos with and without stabilization:
Figure 146. Sample video with stabilization.
Figure 147. Sample video without stabilization.
test_sensor_fusion
Tests the timestamp difference between the camera and the gyroscope for AR and VR applications. The phone is rotated 90 degrees 10 times in front of the checkerboard pattern. Motion is about 2 s round trip. This test is skipped if no gyroscope is included or if the timestamp source REALTIME parameter isn't enabled.
The test_sensor_fusion test generates a number of plots. The two most important plots for debugging are:
test_sensor_fusion_gyro_events: Shows the gyroscope events for the phone during the test. Movement in the x and y direction implies the phone isn't securely mounted on the mounting plate, reducing the probability of the test passing. The number of cycles in the plot depends on the write speed for saving frames.
Figure 148. test_sensor_fusion gyroscope events example.
test_sensor_fusion_plot_rotations: Shows the alignment of the gyroscope and camera events. This plot must show matching movement between camera and gyroscope to +/-1 ms.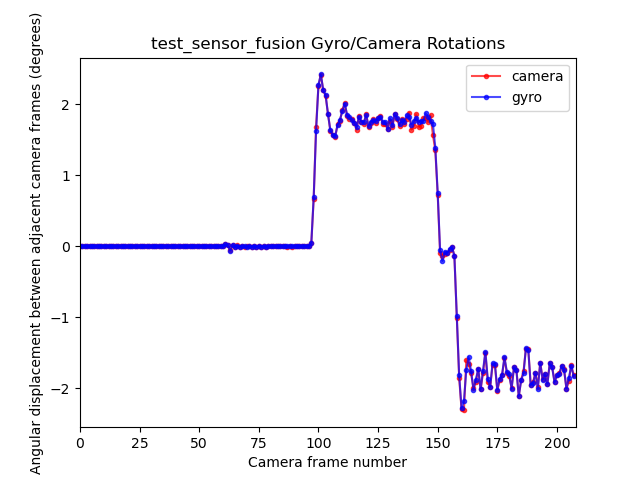
Figure 149. test_sensor_fusion plot rotations example.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#LENS_FACING -
android.hardware.camera2.CameraCharacteristics#SENSOR_INFO_TIMESTAMP_SOURCE -
android.hardware.camera2.CameraMetadata#SENSOR_INFO_TIMESTAMP_SOURCE_REALTIME -
android.hardware.camera2.CaptureRequest#CONTROL_AE_TARGET_FPS_RANGE -
android.hardware.camera2.CaptureRequest#SENSOR_FRAME_DURATION -
android.hardware.camera2.CaptureRequest#SENSOR_TIMESTAMP -
android.hardware.camera2.CaptureResult#SENSOR_ROLLING_SHUTTER_SKEW
Pass: Camera and gyroscope timestamps' offset is less than 1 ms as per 7.3.9 High Fidelity Sensors in the CDD.
Fail mechanisms:
- Offset error: The camera-gyroscope offset isn't correctly calibrated to within +/-1 ms.
- Frame drops: The pipeline isn't fast enough to capture 200 frames consecutively.
- Socket errors:
adbcan't reliably connect to the DUT long enough to execute the test. - The chart isn't mounted flat. The plot
test_sensor_fusion_plot_rotationshas frames where the gyroscope and camera rotation vary considerably as the camera rotates through the parts of the chart that aren't flat. - The camera isn't mounted flat. The plot
test_sensor_fusion_gyro_eventsshows movement in the X and Y planes. This failure is more common in front-facing cameras as the rear camera often has a raised bump to the rest of the phone body, creating a tilt when mounting the rear of the phone to the mounting plate.
test_video_stabilization
Tests that stabilized video rotates less than gyroscope.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.media.MediaRecorder -
android.media.CamcorderProfile
Pass: Maximum angle rotation over frames is less than 60% of gyroscope rotation.
The following are sample videos with and without stabilization.
Figure 150. Sample video with stabilization.
Figure 151. Sample video without stabilization.
test_video_stabilization_jca
Tests that stabilized video captured using the JCA rotates less than the gyroscope. The JCA must be installed on the device before testing.
APIs tested:
-
android.hardware.camera2.CameraCharacteristics#SCALAR_AVAILABLE_CAPABILITIES_STREAM_USE_CASES -
android.media.CamcorderProfile -
android.media.MediaRecorder
Pass: The maximum angle rotation over frames extracted from video captured using the JCA is less than 70% of gyroscope rotation.
feature_combination
The feature_combination tests verify that features work correctly when multiple camera features are enabled at the same time. These tests use the same checkerboard image that is used in the sensor fusion scene .
test_feature_combination
Tests all combinations of different stream combinations, video stabilization mode, target FPS range, 10-bit HDR video, and Ultra HDR that are supported by the camera device.
For Android 16 and higher, the test runs all combinations of supported features, and logs the results into a proto file. Failure assertions are called only for combinations of features for which isSessionConfigurationSupported returns True .
APIs tested:
-
android.hardware.camera2.CameraDevice.CameraDeviceSetup#isSessionConfigurationSupported -
android.hardware.camera2.CameraDevice.CameraDeviceSetup#createCaptureRequest
Pass: For each supported feature combination:
- The preview stream is stabilized if preview stabilization is on.
- The preview frame rate falls within the configured
AE_TARGET_FPS_RANGE. - The recorded preview stream's color space matches what's set.
- The Ultra HDR capture has a valid gain map.
scene_ip
In Android 16 and higher, scene scene_ip enables image parity checks between the default camera app and the Jetpack camera app (JCA) to identify major differences between captured images. The JCA replicates social media app captures and provides a baseline image that that social media apps then process and refine.
Hardware setup requirements
The following hardware setup is required for scene_ip tests:
- Tests are executed in the Gen2 camera ITS-in-a-box .
- The lighting and servo controllers that are part of the Gen2 rig are used to control the test environment
- A test feature chart is placed inside the Gen2 rig.
Figure 152. Gen2chart_sample example.
Test skip criteria
The scene_ip tests are skipped if any of the following criteria are met:
- The device has a first API level (
first_api_level) of 35 or lower. - The device isn't a phone device with front and rear primary camera devices (for example, a tablet or TV).
test_default_jca_ip
Takes captures of the test feature chart under controlled lighting conditions using the default camera app and the JCA and performs the following checks:
FoV: Checks that the default camera app and JCA captures have the same FoV. This check uses the center QR Code feature extracted from the captures chart image.
Brightness: Checks that the brightness difference measured between the default camera app and JCA doesn't exceed 10. This check uses the dynamic range patch for brightness measurement.
White balance: Checks that the white balance difference between the default camera app and JCA doesn't exceed 4. This check uses the dynamic range patch for brightness measurement.
Basic section pass: Test passes the FoV, brightness, and white balance checks. In Android 16, this test isn't mandated ( NOT_YET_MANDATED ).