
La prueba de fusión de sensores mide la precisión de la marca de tiempo de los sensores de los dispositivos Android, específicamente los sensores de imagen de la cámara y los giroscopios. En esta página, se proporcionan instrucciones paso a paso para configurar la prueba de fusión de sensores y la caja de fusión de sensores por primera vez.
Video instructivo
Este es un instructivo en video sobre cómo configurar la caja de fusión de sensores.
Herramientas necesarias
Antes de comenzar, asegúrate de tener los siguientes componentes:

- Cable USB A a B
- Cable USB A a C (para el teléfono de prueba)
- Cable de alimentación de 12 V y 2 A (para la caja de control del servo)
- Cable de alimentación de 12 V (para iluminación, con interruptor)
- Cable de conexión macho-macho de 5 V (para iluminación)
- Cable de conversión macho-hembra de 5 V (para iluminación)
Paso 1: Conecta las luces
Para conectar las luces, haz lo siguiente:
- Usa el cable macho-macho para conectar las dos luces en los extremos inferiores, como se muestra en la figura 2. Fija el cable a la parte inferior de la caja para evitar que interfiera en la operación.
- Conecta el extremo de la luz más cercano al orificio de salida del cable de luz al cable de conversión.
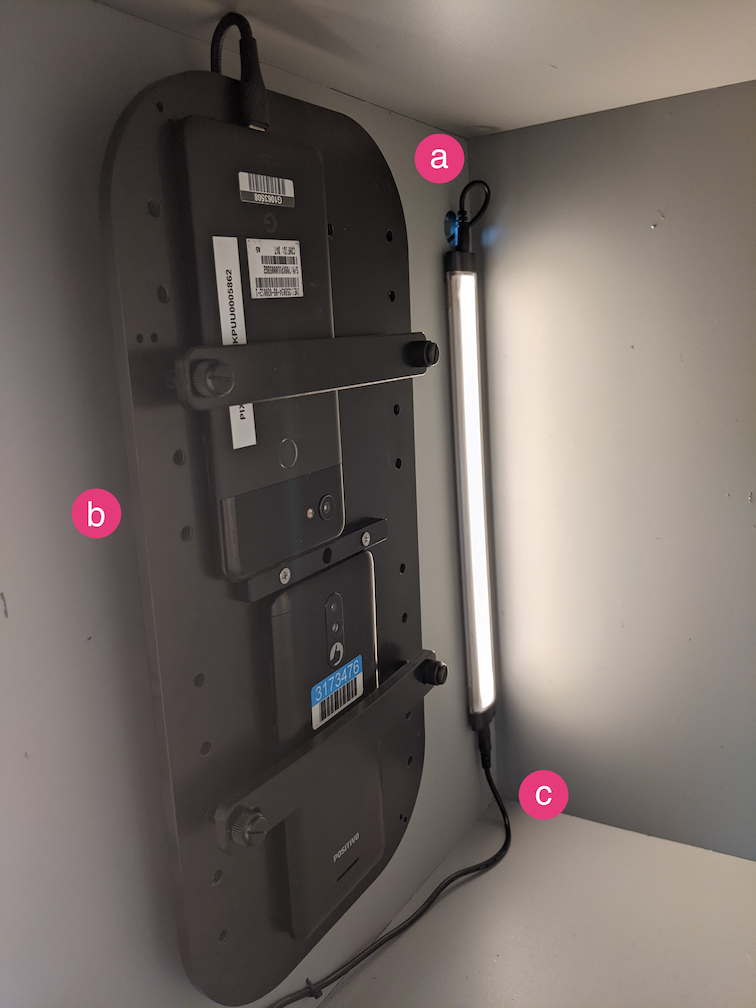
Figura 2: Conectar las luces entre sí y una luz al cable de conversión - Orificio de salida del cable de luz
- Orificio de salida del cable USB
- Cable de conversión macho a macho de 5 V
- Pasa el extremo desconectado del cable de conversión por el orificio redondo que sale de la caja y, luego, conéctalo al cable de alimentación de la iluminación.
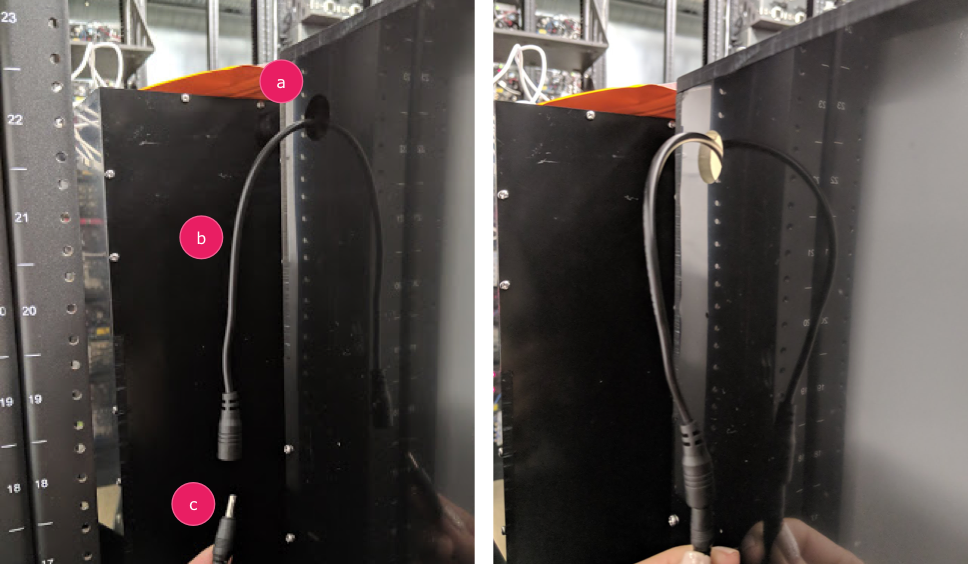
Figura 3: Cable de conversión de iluminación que sale de la caja y se conecta al cable de alimentación - Orificio de salida
- Cable de conversión
- Cable de alimentación
Paso 2: Conecta el servomotor
Para conectar el servo, haz lo siguiente:
- Enchufa el conector del servo en el control del servo. Asegúrate de insertar el conector orientado a los colores correspondientes según la etiqueta (Y = amarillo, R = rojo, B = negro), ya que invertir el orden podría dañar el motor. Si el cable es demasiado corto, usa un
cable de extensión para servo.
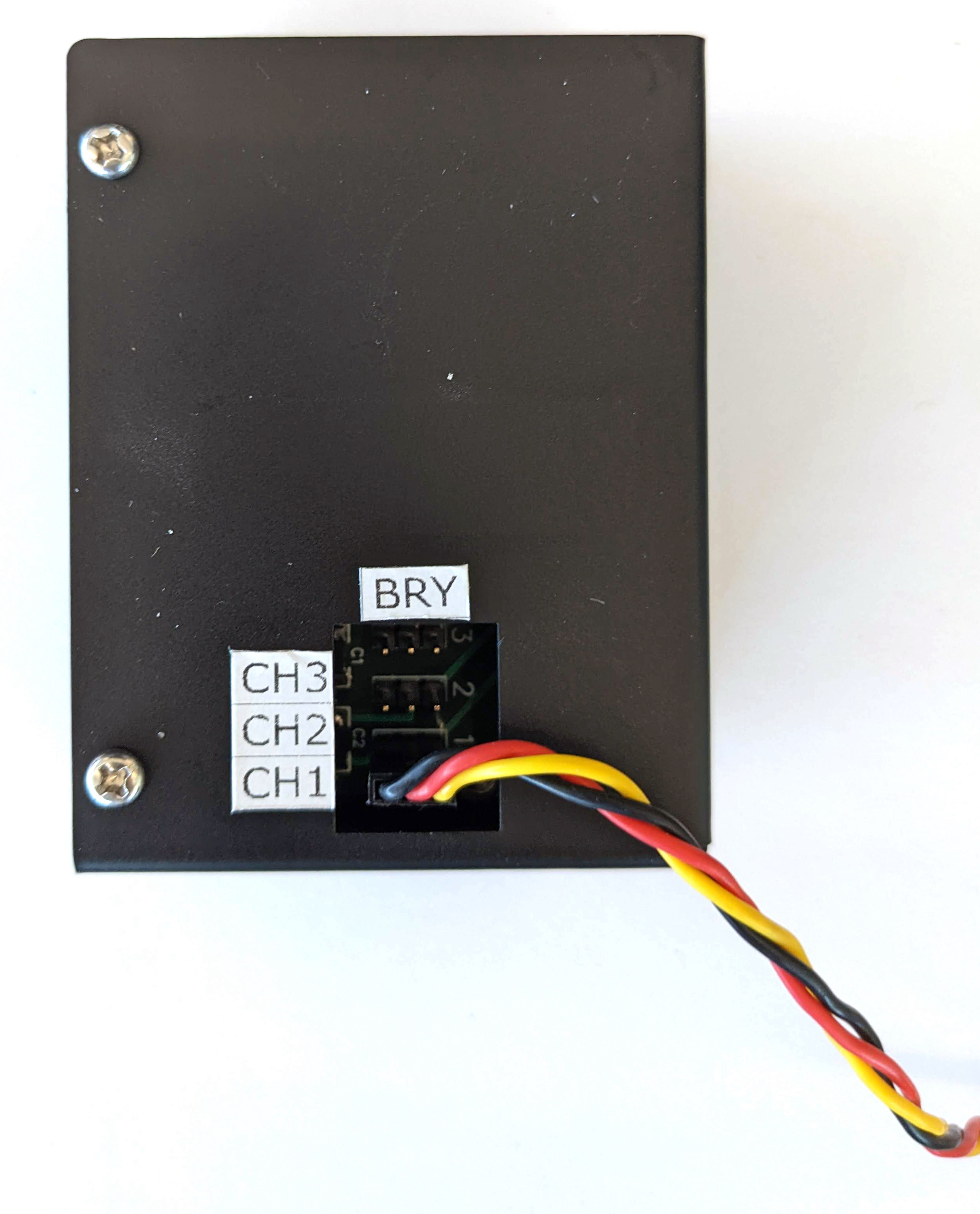
Figura 4: Servo que se conecta a la caja de control del servo - Conecta el control del servo con su cable de alimentación (la iluminación y el control del servo tienen fuentes de alimentación independientes y dedicadas).

Figura 5: Cómo conectar el control de servo al cable de alimentación dedicado - Usa el cable USB A a B para conectar la caja de control del servo al anfitrión (la máquina que ejecuta la prueba).
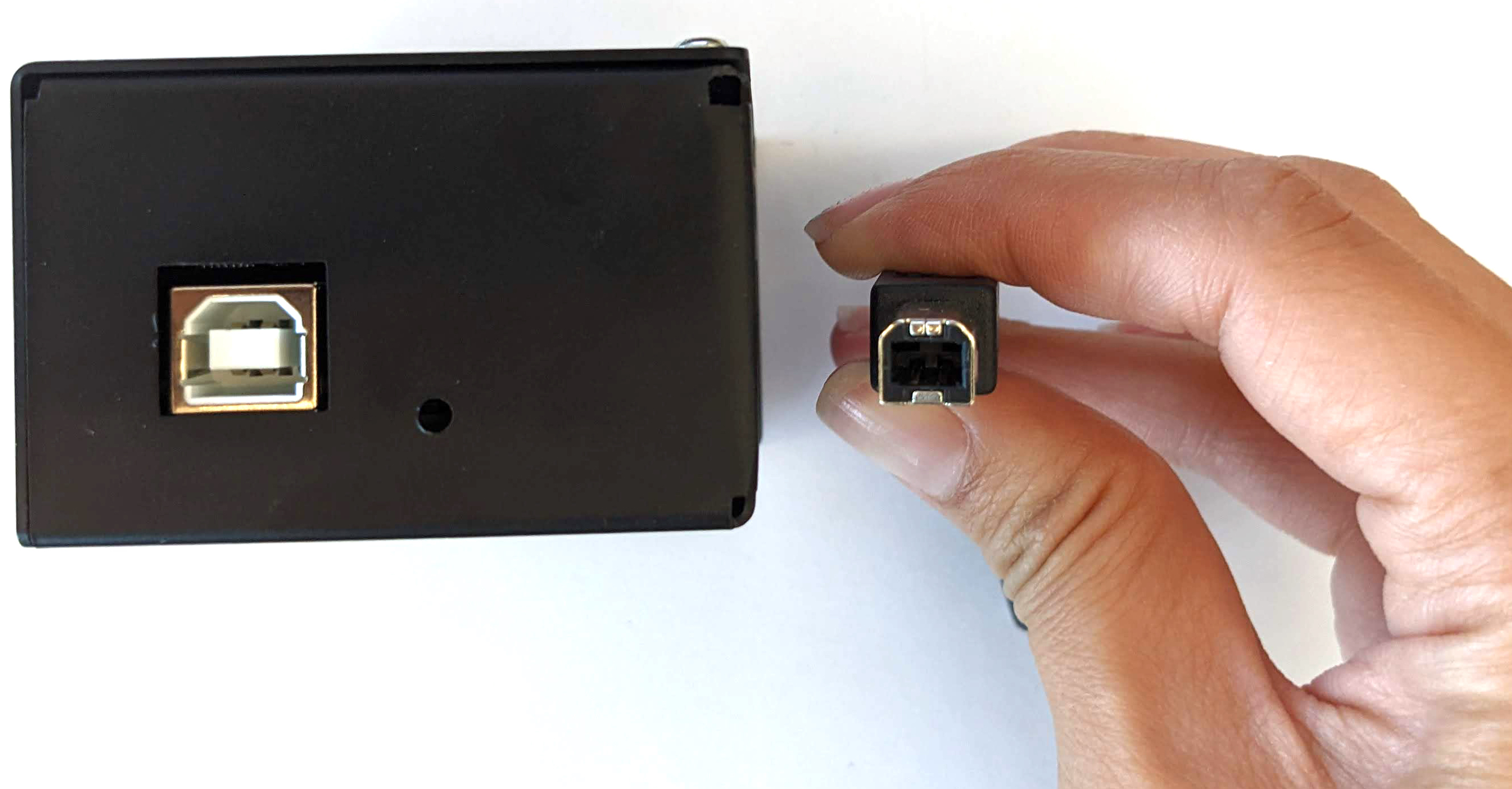
Figura 6: Cómo conectar la caja de control del servo a la máquina host
Paso 3: Conecta el teléfono
- Coloca el teléfono en el soporte y asegúralo. Para ajustarlo, gira el tornillo de nailon hacia la derecha.

Figura 7: Colocar y sujetar el teléfono en el soporte Los teléfonos deben colocarse de manera que los cables USB estén en la periferia del soporte para teléfonos y las cámaras estén cerca del centro del soporte.
- Usa un precinto para sujetar el cable USB del teléfono a la placa del accesorio y guíalo fuera de la caja por el orificio de salida. Conecta el otro extremo del cable al host que ejecuta la prueba.
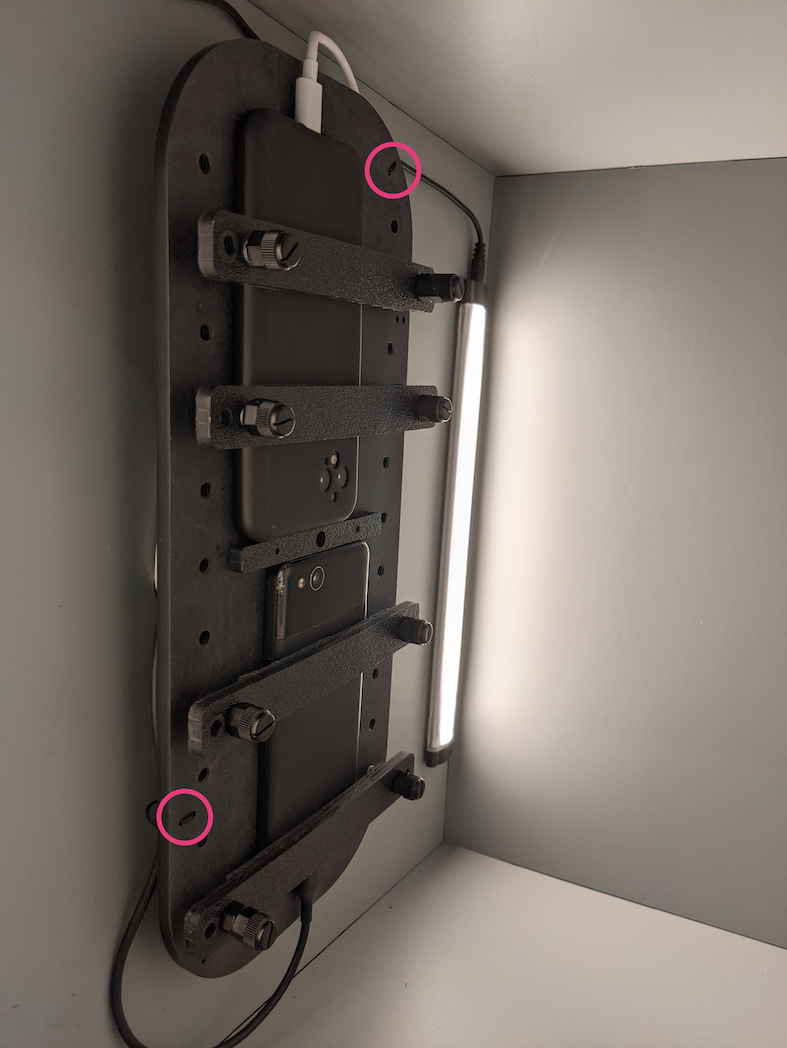
Figura 8: Cable USB del teléfono sujeto al accesorio con precintos
Paso 4: Ejecuta la secuencia de comandos de prueba
El ejecutable principal de Python para la secuencia de comandos de prueba es el siguiente:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Puedes modificar el comando para especificar la dirección real del rotador con lo siguiente:
rot_rig=VID:PID:CH
- Para determinar el ID de proveedor (VID) y el ID de producto (PID), usa el comando
lsusbde Linux. - De forma predeterminada, el VID y el PID se establecen en
04d8yfc73con el canal “1”.
Varias ejecuciones, diferentes formatos
Para realizar varias ejecuciones con diferentes formatos, puedes usar una secuencia de comandos diferente (sin embargo, los resultados no se subirán a CtsVerifier.apk). Ejemplo de secuencia de comandos de prueba:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Problemas de permisos
Para resolver problemas de permisos relacionados con el control del motor a través del puerto USB, haz lo siguiente:
- Agrega el nombre de usuario del operador al grupo
dialoutcon lo siguiente:sudo adduser USERNAME dialout - Haz que el operador salga de la cuenta.
- Haz que el operador acceda.