
O teste de fusão do sensor mede a precisão do carimbo de data e hora de sensores para dispositivos Android, especificamente sensores de imagem da câmera e giroscópios. Esta página fornece instruções detalhadas sobre como configurar o teste de Fusão do sensor e a Caixa de fusão do sensor pela primeira vez.
Tutorial em vídeo
Este é um tutorial em vídeo sobre como configurar a caixa de fusão do sensor.
Ferramentas necessárias
Antes de começar, verifique se você tem os seguintes componentes:

- Cabo USB A para B
- Cabo USB A para C (para o smartphone de teste)
- Cabo de alimentação de 12 V e 2 A (para a caixa de controle do servomotor)
- Cabo de alimentação de 12 V (para iluminação, com interruptor)
- Cabo de conexão macho-macho de 5 V (para iluminação)
- Cabo de conversão macho-fêmea de 5 V (para iluminação)
Etapa 1: conectar as luzes
Para conectar as luzes:
- Use o cabo macho-macho para conectar as duas luzes nas extremidades inferiores das luzes, conforme mostrado na Figura 2. Prenda o cabo na parte de baixo da caixa para que ele não interfira na operação.
- Conecte a extremidade da luz mais próxima do orifício de saída do cabo à
do cabo de conversão
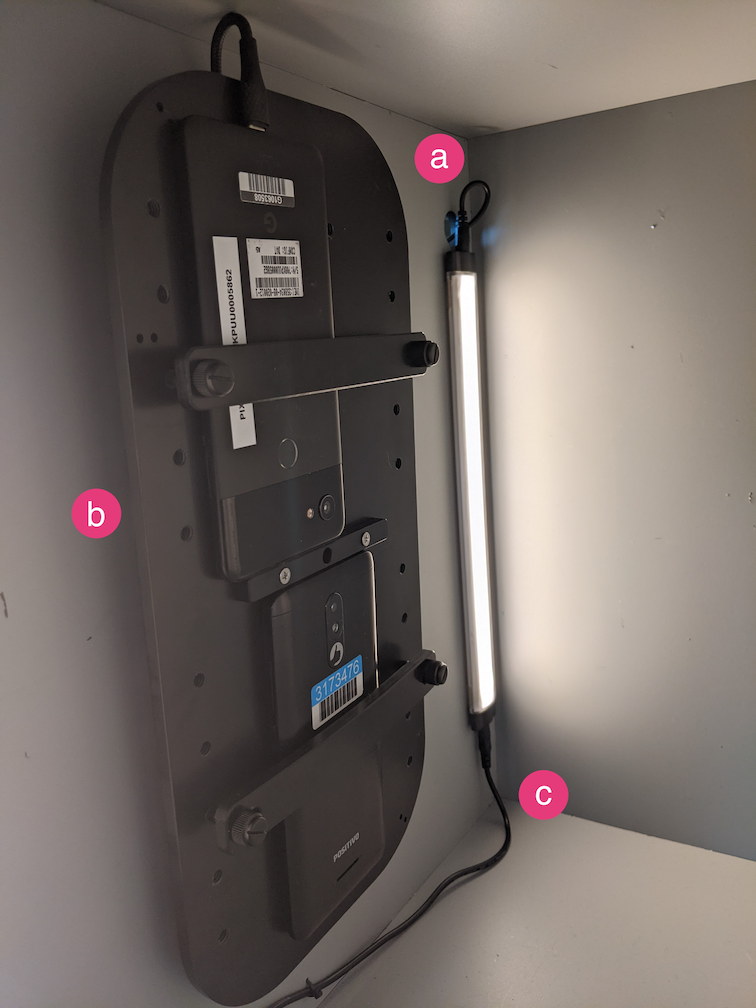
Figura 2. Conectar as luzes uma à outra e uma luz ao cabo de conversão - Orifício de saída do cabo de luz
- Orifício de saída do cabo USB
- Cabo de conversão macho-macho de 5 V
- Passe a extremidade não conectada do cabo de conversão pelo orifício
redondo que sai da caixa e conecte-o ao cabo de
alimentação para a iluminação.
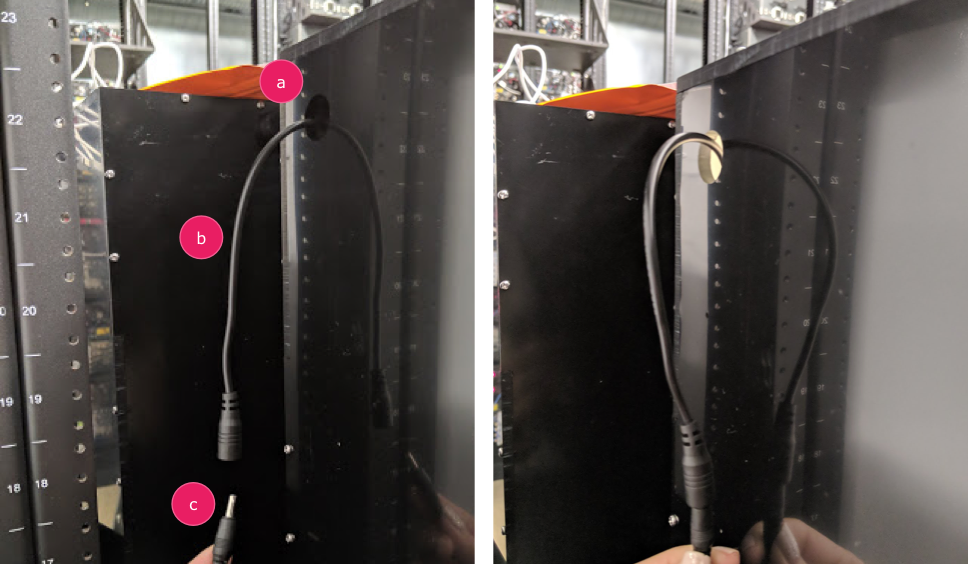
Figura 3. Cabo de conversão de iluminação saindo da caixa e se conectando ao cabo de alimentação - Saída do furo
- Cabo de conversão
- Cabo de alimentação
Etapa 2: conectar o servomotor
Para conectar o servo:
- Conecte o conector do servo ao controle do servo. Insira
o conector orientado às cores correspondentes conforme indicado (Y =
amarelo, R = vermelho, B = preto), porque inverter a ordem pode danificar o
motor. Se o cabo for muito curto, use um
cabo de extensão do servo.
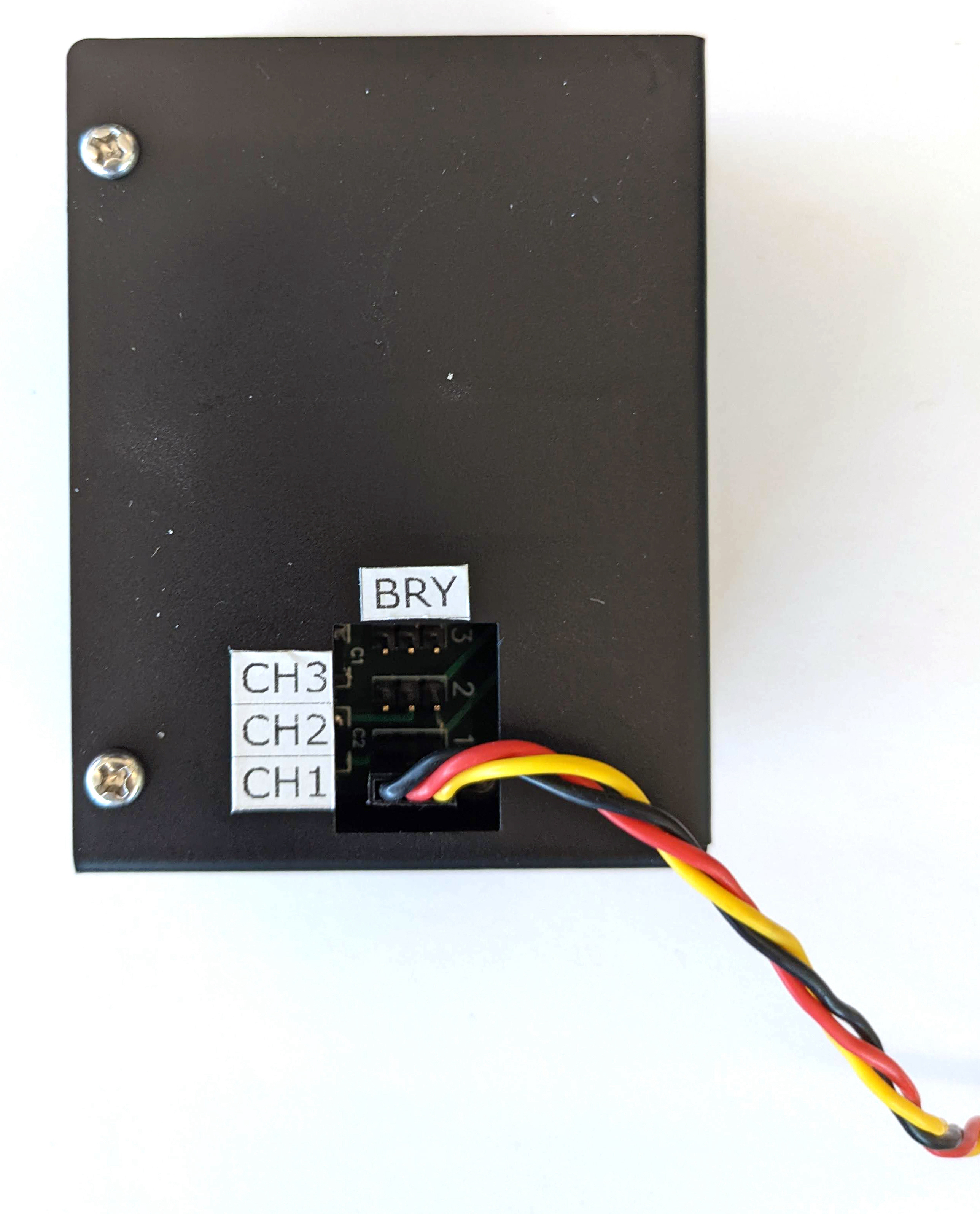
Figura 4. Servomotor conectado à caixa de controle do servomotor - Conecte o servocontrole com o cabo de alimentação (a iluminação e
o servocontrole têm fontes de alimentação independentes e dedicados).

Figura 5. Como conectar o controle do servo ao cabo de alimentação dedicado - Use o cabo USB A para B para conectar a caixa de controle do servo ao
host (máquina que está executando o teste).
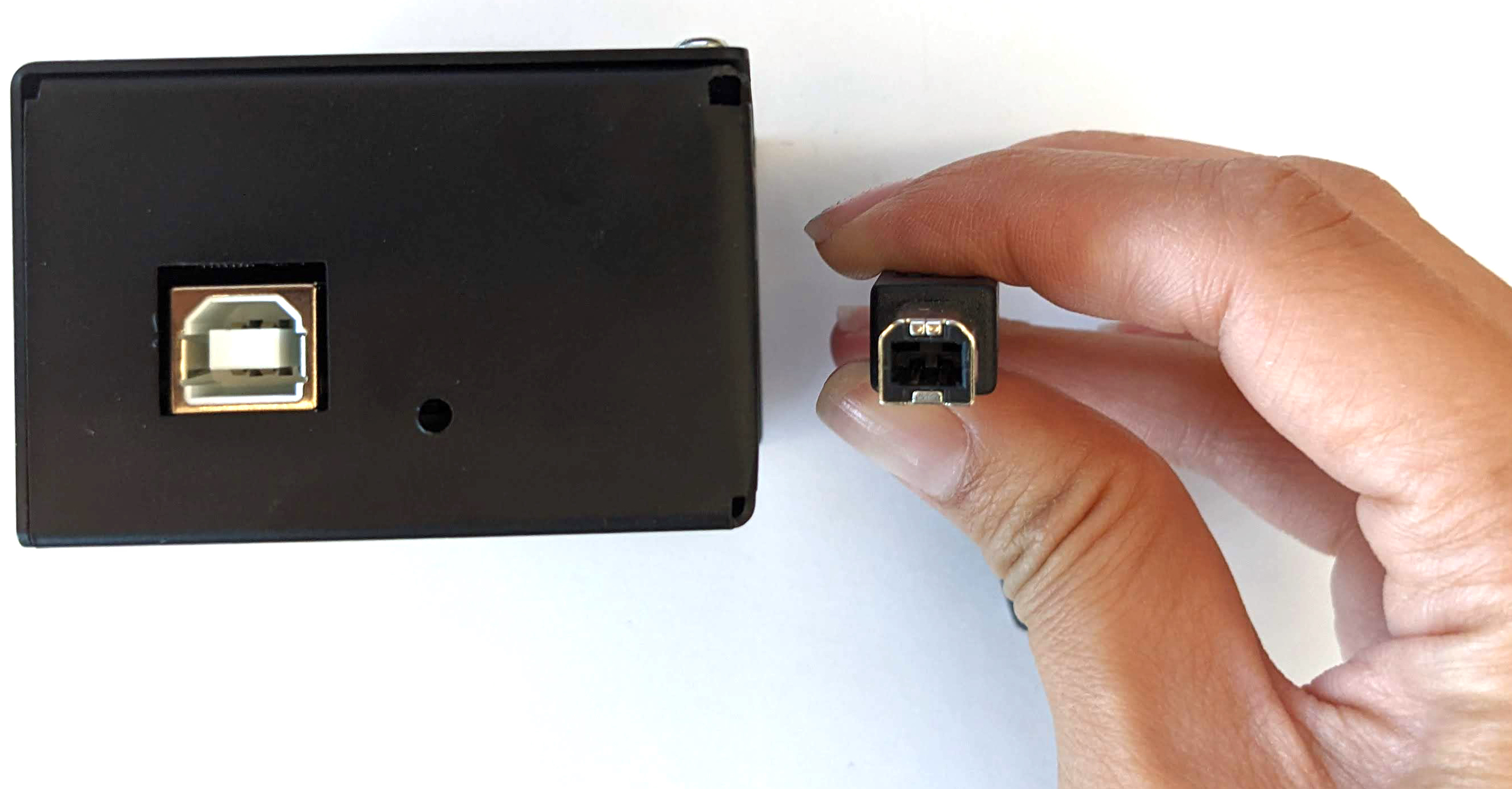
Figura 6. Como conectar a caixa de controle do servo à máquina host
Etapa 3: conectar o smartphone
- Coloque o smartphone no suporte e prenda-o. Aperte girando o
parafuso de náilon para a direita.

Figura 7. Como colocar e prender o smartphone no suporte Os smartphones precisam ser colocados de modo que os cabos USB fiquem na periferia do suporte e as câmeras fiquem perto do centro do suporte.
- Use um prendedor de cabo para prender o cabo USB do smartphone à placa de fixação e
direcioná-lo para fora da caixa pelo orifício de saída. Conecte a outra extremidade
do cabo ao host que está executando o teste.
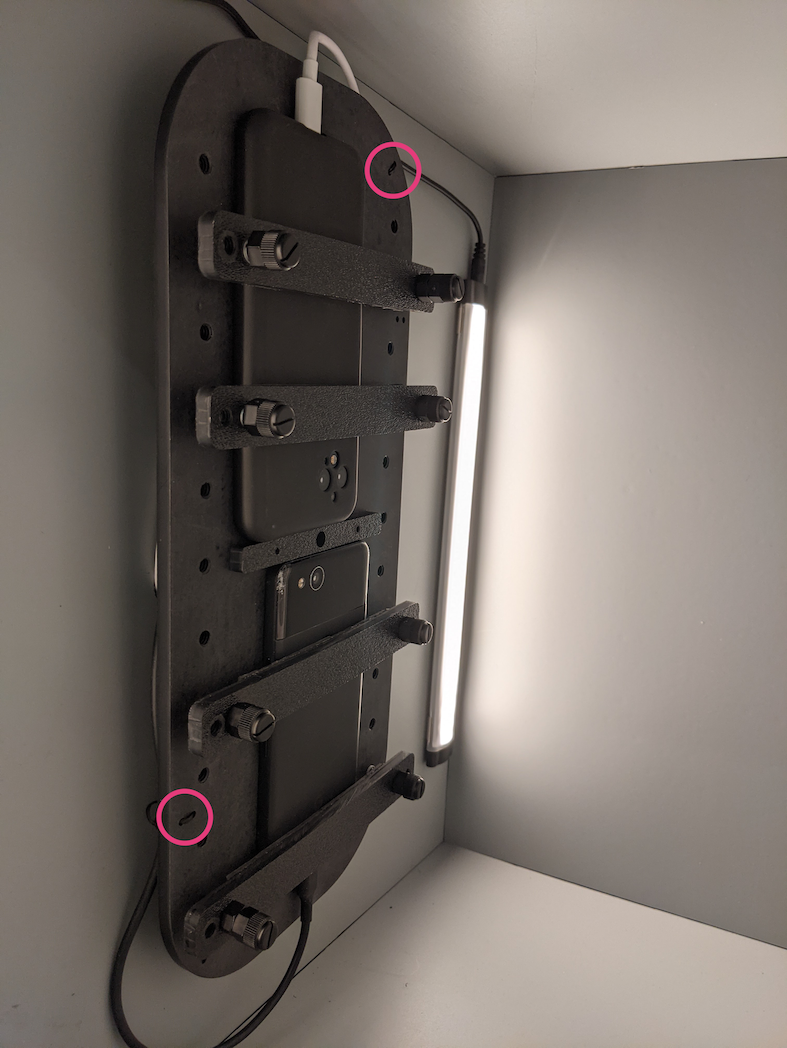
Figura 8. Cabo USB do smartphone preso ao suporte com amarrações
Etapa 4: executar o script de teste
O executável principal do Python para o script de teste é:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
É possível modificar o comando para especificar o endereço real do roteador usando:
rot_rig=VID:PID:CH
- Para determinar o ID do fornecedor (VID) e o ID do produto (PID), use o comando
lsusbdo Linux. - Por padrão, o VID e o PID são definidos
como
04d8efc73com o canal "1".
Várias execuções, formatos diferentes
Para realizar várias execuções com formatos diferentes, use um
script diferente. No entanto, os resultados não serão enviados para
CtsVerifier.apk. Exemplo de script de teste:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Problemas de permissão
Para resolver problemas de permissão relacionados ao controle do motor pela porta USB:
- Adicione o nome de usuário do operador ao grupo
dialoutusando:sudo adduser USERNAME dialout - Desconecte o operador.
- Faça login no operador.