
传感器融合测试旨在衡量 Android 设备上传感器(尤其是相机图像传感器和陀螺仪)的时间戳准确度。本页将逐步介绍首次设置传感器融合测试和传感器融合盒时如何操作。
视频教程
此视频教程介绍了如何设置传感器融合盒。
所需工具
在开始之前,请确保您已准备好以下组件:

- USB A 转 B 线缆
- USB A 转 C 线缆(用于连接测试手机)
- 12V 2A 电源线(用于连接伺服控制箱)
- 12V 电源线(用于连接灯具,带开关)
- 5V 公形对公形连接线缆(用于连接灯具)
- 5V 公形对母形转换线缆(用于连接灯具)
第 1 步:连接灯具
要连接灯具,请执行以下操作:
- 使用公形对公形线缆在灯底端将两盏灯连起来(如图 2 所示)。将线缆固定到盒子底部,以防止线缆干扰操作。
- 将灯具靠近灯具线缆出口孔的一端连接到转换线缆
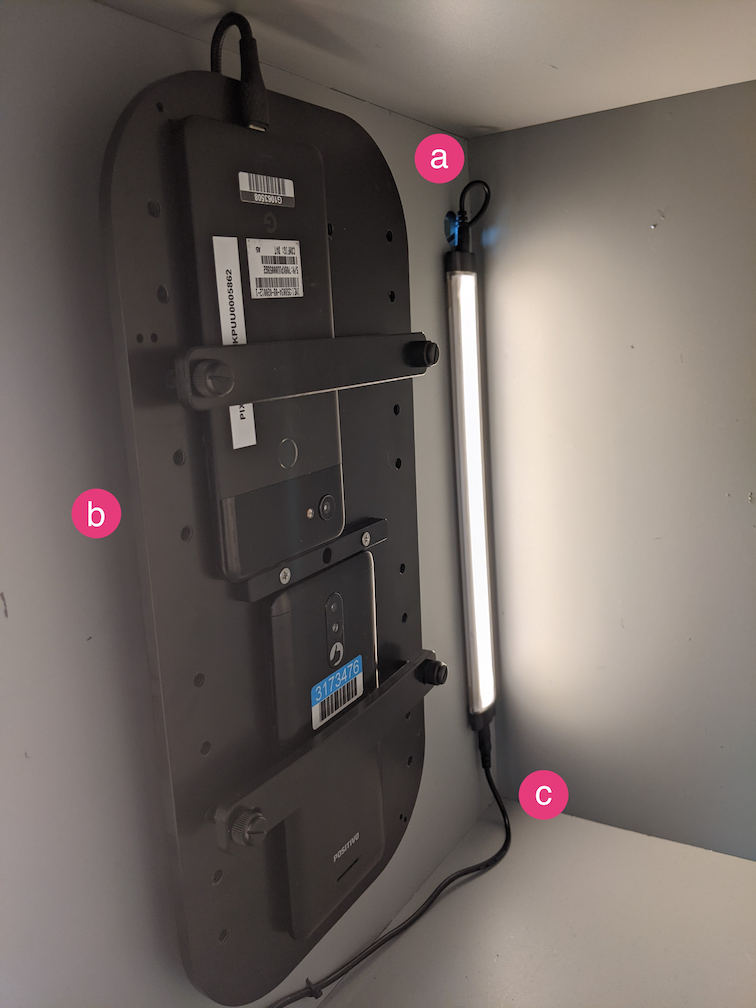
图 2. 将两盏灯连接在一起,并将一盏灯连接到转换线缆 - 灯具线缆出口孔
- USB 线缆出口孔
- 5V 公形对公形转换线缆
- 将转换线缆未连接灯具的一端从通往盒外的圆孔中穿出,然后连接到灯具的电源线。
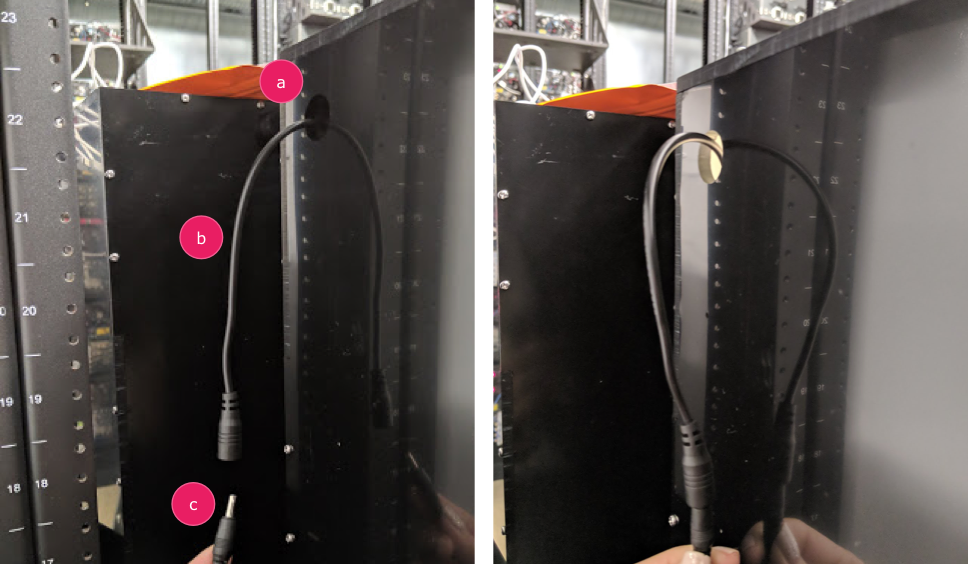
图 3. 将灯具转换线从盒子上的出口孔拉出并连接到电源线 - 出口孔
- 转换线缆
- 电源线
第 2 步:连接伺服器
如需连接伺服器,请执行以下操作:
- 将伺服器接头插入伺服控制箱。插入接头时,请务必确保线的颜色与标示的颜色一一对应(Y = 黄色,R = 红色,B = 黑色),颜色顺序颠倒可能会损坏电机。如果线太短,请使用伺服器延长线。
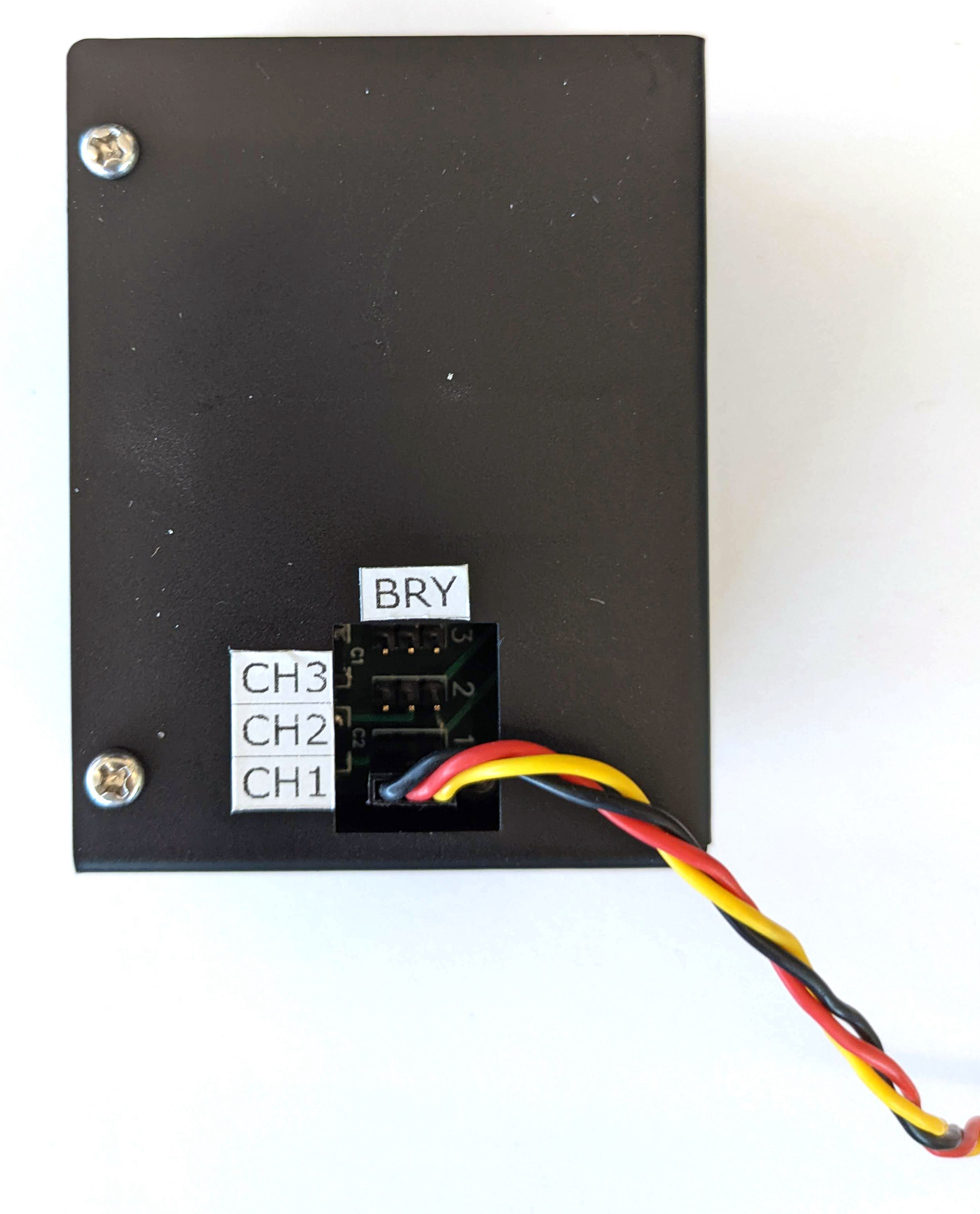
图 4。伺服器连接到伺服控制箱 - 将伺服控制箱连接到电源线(灯具和伺服控制箱具有单独的专用电源)。

图 5. 将伺服控制箱连接到其专用电源线 - 使用 USB A 转 B 线缆将伺服控制箱连接到主机(即运行测试的机器)。
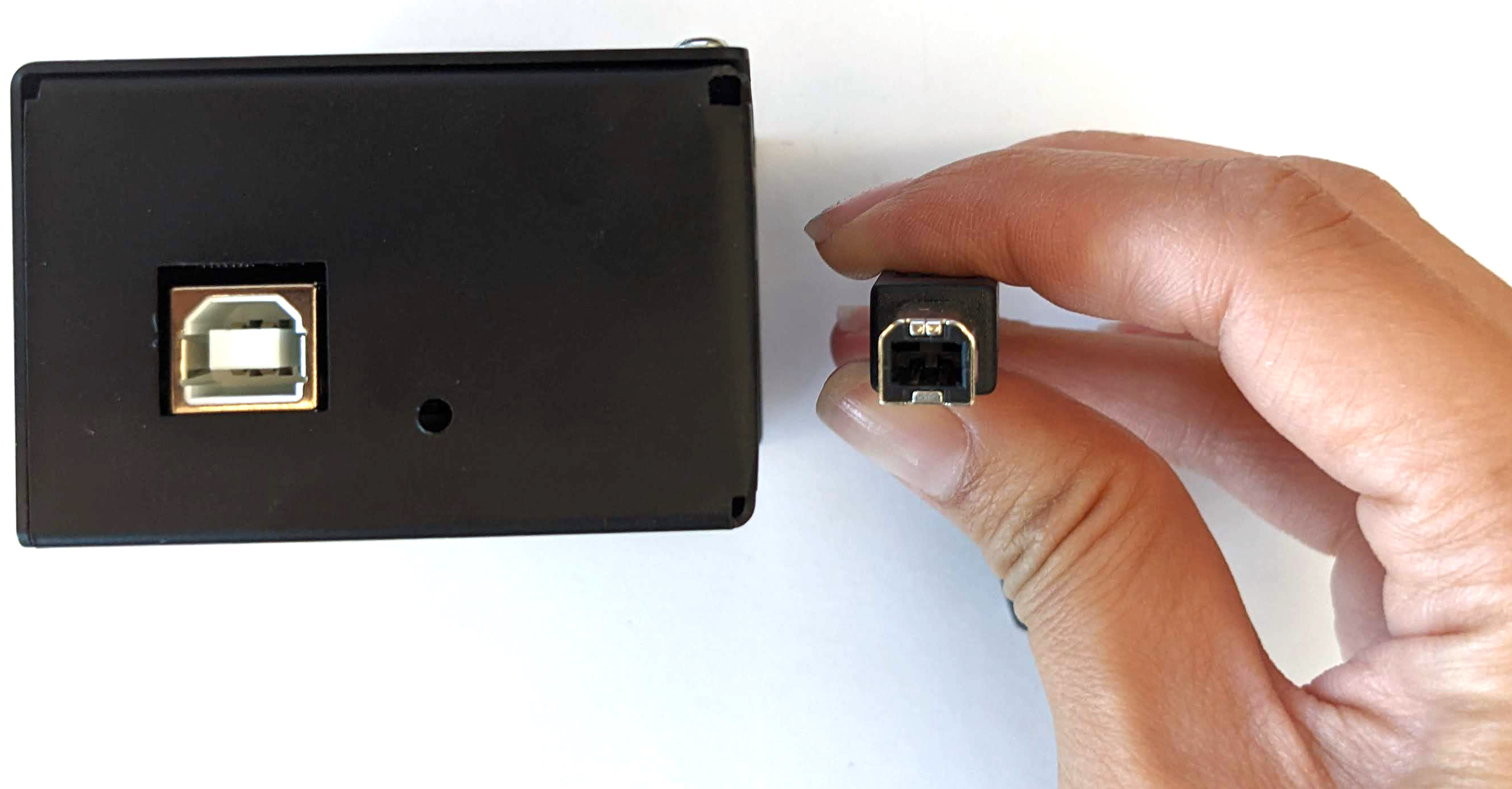
图 6. 将伺服控制箱连接到主机
第 3 步:固定手机
- 将手机放在手机夹上并夹紧。向右拧紧尼龙螺钉。

图 7. 将手机放在手机夹上并夹紧 放置手机时,应保证 USB 线位于手机托架外围且摄像头靠近托架中心。
- 使用束线带将手机 USB 线固定在手机夹板上,并穿过出口孔引出盒外。将这条线的另一端插入到运行测试的主机。
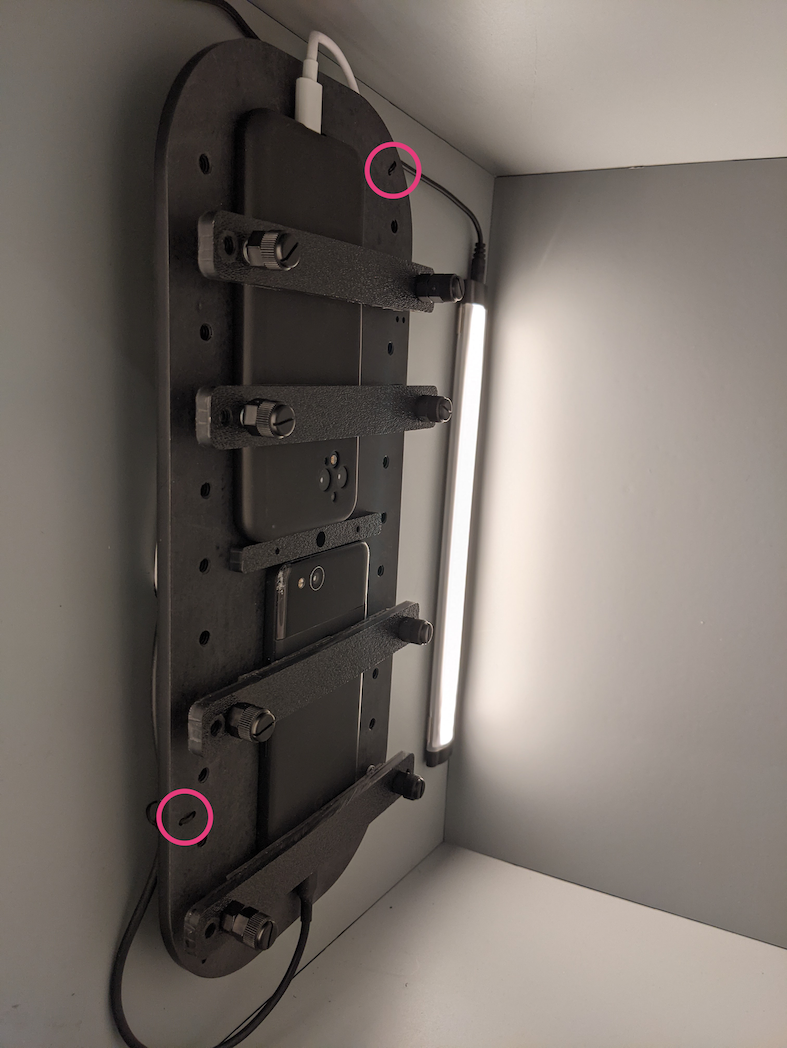
图 8. 使用束线带将手机 USB 线固定在手机夹上
第 4 步:运行测试脚本
测试脚本的主 Python 可执行代码是:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
您可以使用以下内容修改以上命令来指定实际旋转器地址:
rot_rig=VID:PID:CH
- 如需确定供应商 ID (VID) 和产品 ID (PID),请使用 Linux 命令
lsusb。 - 默认情况下,VID 和 PID 会设为
04d8和fc73,并使用频道“1”。
多次运行,不同格式
如需使用不同格式运行多次,您可以使用不同的脚本(不过,结果不会上传到 CtsVerifier.apk)。示例测试脚本如下:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7权限问题
如需解决与通过 USB 端口控制电机相关的权限问题,请执行以下操作:
- 使用以下命令将操作人员用户名添加到
dialout组:sudo adduser USERNAME dialout - 退出操作人员账号。
- 登录操作人员账号。