
Pengujian penggabungan sensor mengukur akurasi stempel waktu sensor untuk perangkat Android, khususnya sensor gambar kamera dan giroskop. Halaman ini memberikan petunjuk langkah demi langkah tentang cara menyiapkan pengujian Sensor Fusion dan Sensor Fusion Box untuk pertama kalinya.
Video tutorial
Ini adalah tutorial video tentang cara menyiapkan kotak penggabungan sensor.
Alat yang diperlukan
Sebelum memulai, pastikan Anda memiliki komponen berikut:

- Kabel USB A ke B
- Kabel USB A ke C (untuk ponsel pengujian)
- Kabel daya 12 V 2 A (untuk kotak kontrol servo)
- Kabel daya 12 V (untuk pencahayaan, dengan tombol)
- Kabel koneksi male-male 5 V (untuk pencahayaan)
- Kabel konversi male-female 5 V (untuk pencahayaan)
Langkah 1: Hubungkan lampu
Untuk menghubungkan lampu:
- Gunakan kabel male-male untuk menghubungkan kedua lampu di ujung bawah lampu seperti yang ditunjukkan pada gambar 2. Kencangkan kabel ke bagian bawah kotak agar kabel tidak mengganggu operasi.
- Hubungkan ujung lampu lebih dekat ke lubang keluar kabel lampu ke
kabel konversi
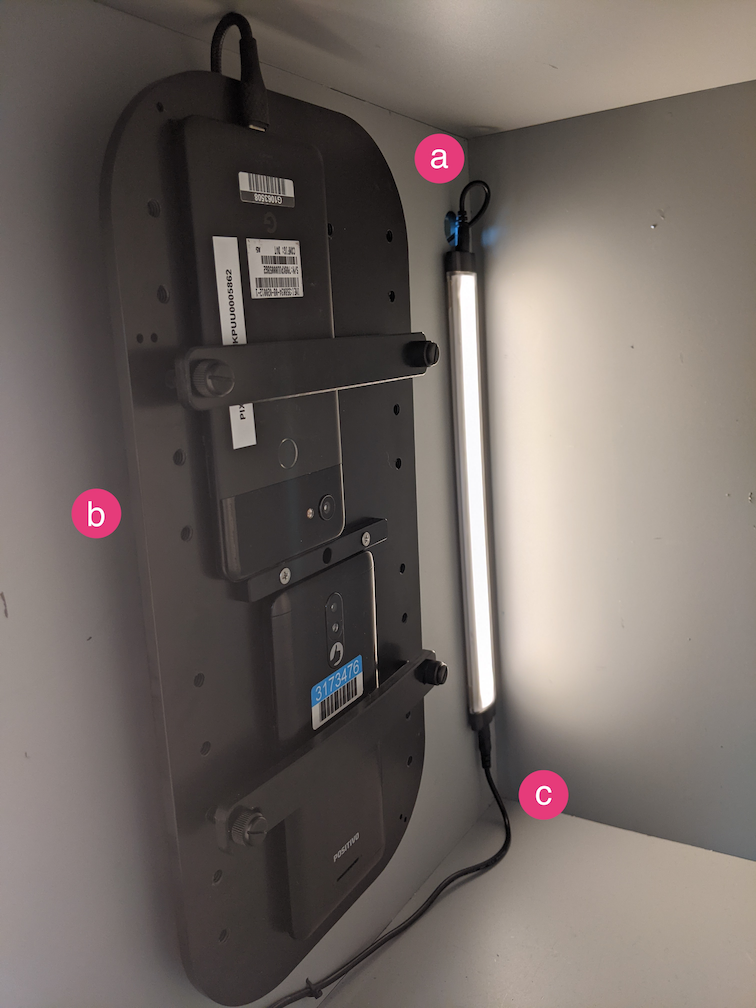
Gambar 2. Menghubungkan lampu satu sama lain dan satu lampu ke kabel konversi - Lubang keluar kabel lampu
- Lubang keluar kabel USB
- Kabel konversi male-male 5 V
- Masukkan ujung kabel konversi yang tidak terhubung melalui lubang
bulat yang keluar dari kotak, lalu hubungkan ke kabel
daya untuk pencahayaan.
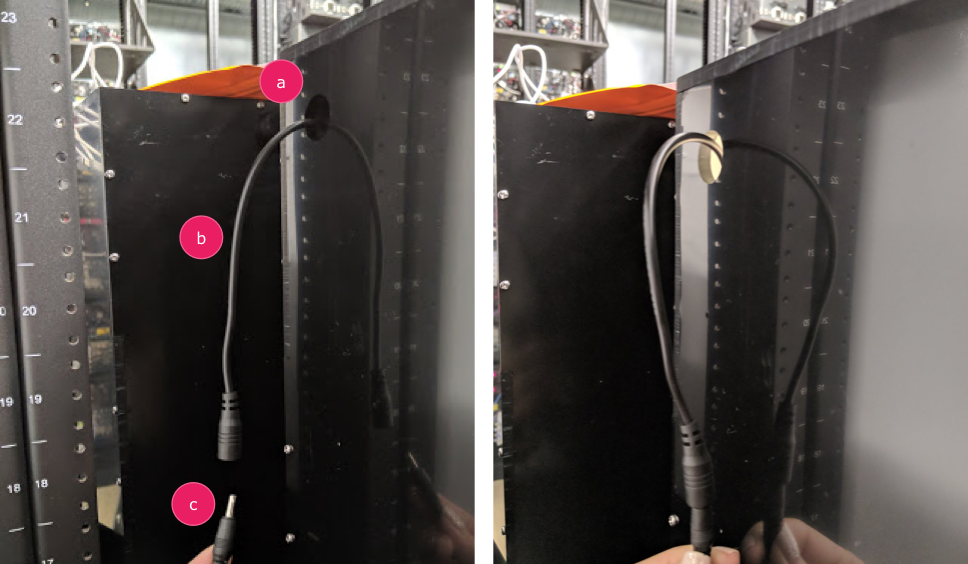
Gambar 3. Kabel konversi pencahayaan yang keluar dari kotak dan terhubung ke kabel daya - Lubang keluar
- Kabel konversi
- Kabel daya
Langkah 2: Pasang servo
Untuk memasang servo:
- Colokkan konektor servo ke kontrol servo. Pastikan untuk memasukkan
konektor yang berorientasi pada warna yang sesuai seperti yang diberi label (Y =
Kuning, R = Merah, B = Hitam), karena membalik urutan dapat merusak
motor. Jika kabel terlalu pendek, gunakan
kabel ekstensi servo.

Gambar 4. Servo yang terhubung ke kotak kontrol servo - Hubungkan kontrol servo dengan kabel daya (kontrol pencahayaan dan
servo memiliki catu daya khusus yang independen).

Gambar 5. Menghubungkan kontrol servo ke kabel daya khusus - Gunakan kabel USB A ke B untuk menghubungkan kotak kontrol servo ke
host (mesin yang menjalankan pengujian).
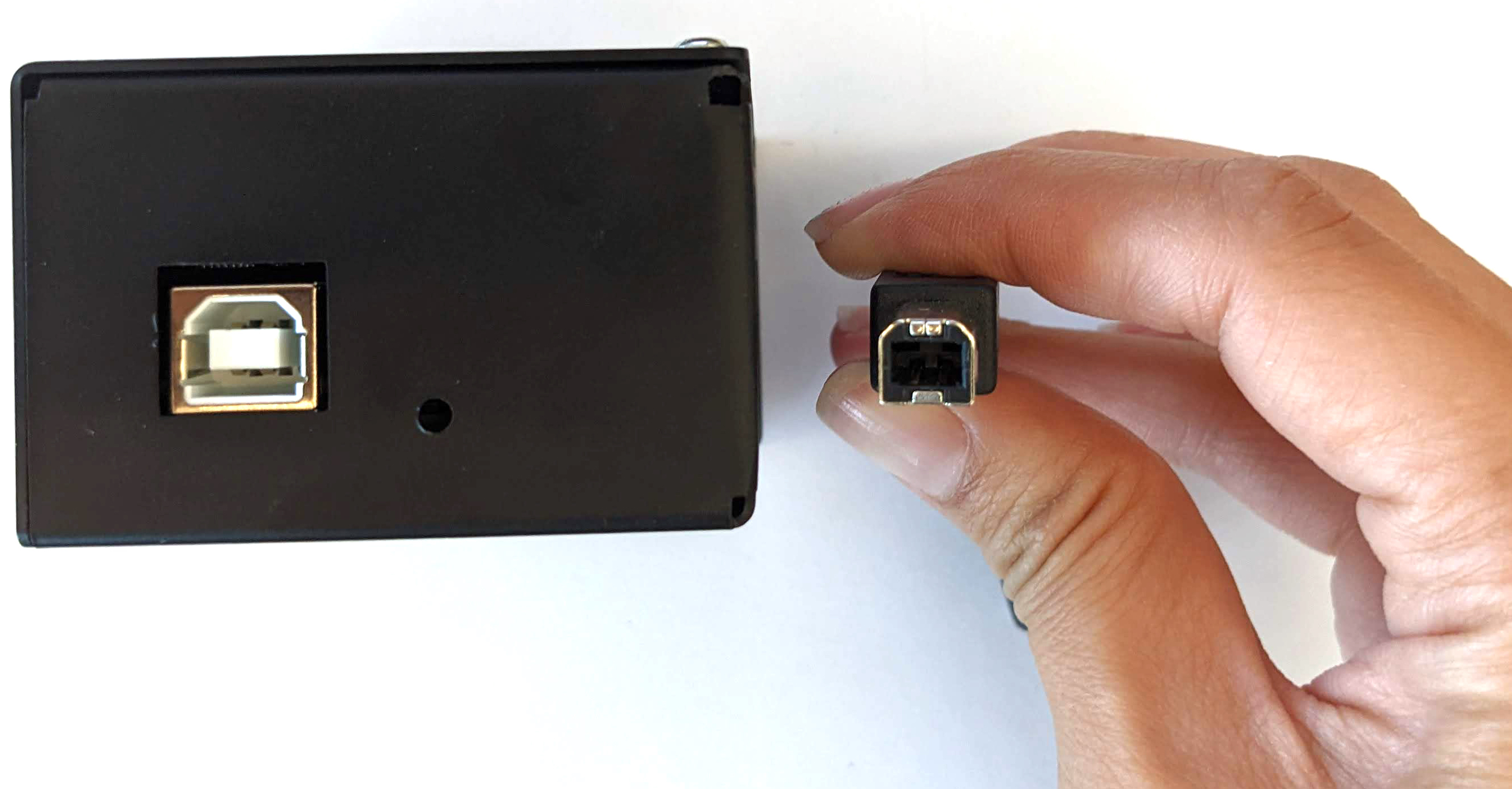
Gambar 6. Menghubungkan kotak kontrol servo ke mesin host
Langkah 3: Pasang ponsel
- Letakkan ponsel di dudukan dan kencangkan. Kencangkan dengan memutar
sekrup nilon ke kanan.

Gambar 7. Menempatkan dan menjepit ponsel di perlengkapan Ponsel harus ditempatkan sedemikian rupa sehingga kabel USB berada di pinggiran dudukan ponsel dan kamera berada di dekat pusat dudukan.
- Gunakan kabel ties untuk menahan kabel USB ponsel ke pelat perlengkapan dan
mengarahkannya ke luar kotak melalui lubang keluar. Colokkan ujung kabel lainnya ke host yang menjalankan pengujian.
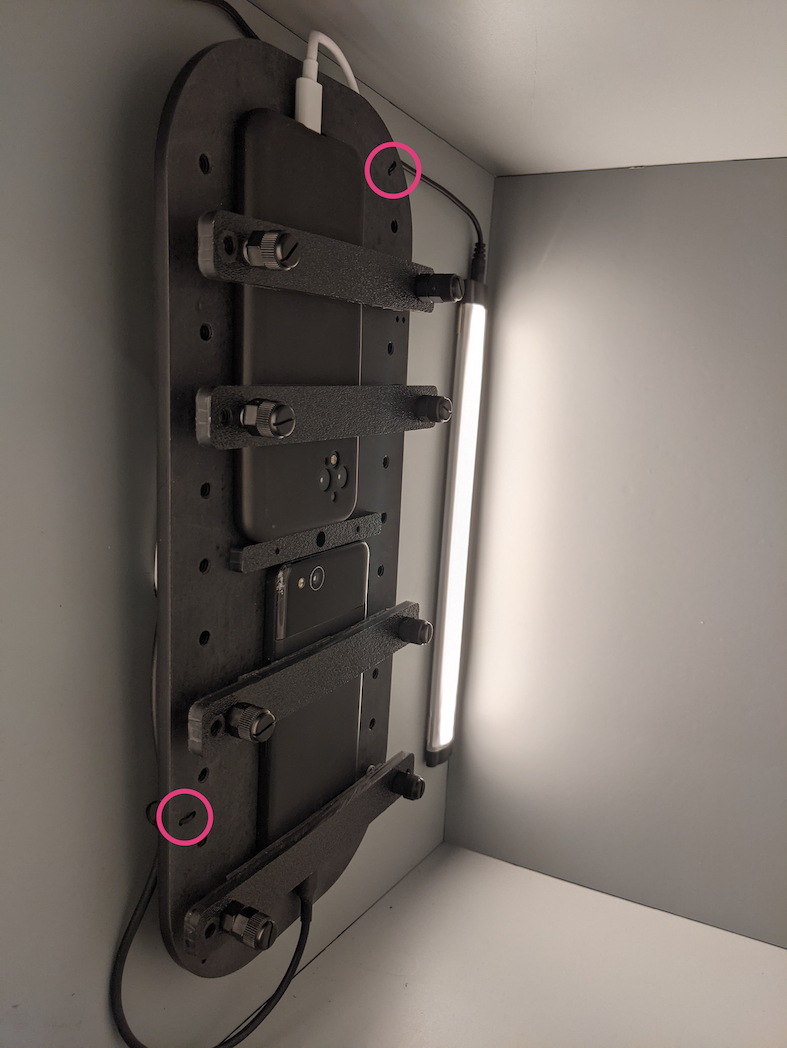
Gambar 8. Kabel USB ponsel diikat ke perlengkapan dengan kabel ties
Langkah 4: Jalankan skrip pengujian
File python utama yang dapat dieksekusi untuk skrip pengujian adalah:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Anda dapat mengubah perintah untuk menentukan alamat rotator yang sebenarnya menggunakan:
rot_rig=VID:PID:CH
- Untuk menentukan ID Vendor (VID) dan ID Produk (PID), gunakan perintah Linux
lsusb. - Secara default, VID dan PID ditetapkan
ke
04d8danfc73dengan saluran "1".
Beberapa operasi, format berbeda
Untuk melakukan beberapa operasi dengan format yang berbeda, Anda dapat menggunakan skrip yang berbeda (tetapi, hasilnya tidak akan diupload ke CtsVerifier.apk). Contoh skrip pengujian:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Masalah izin
Untuk mengatasi masalah izin yang terkait dengan pengontrolan motor melalui port USB:
- Tambahkan nama pengguna operator ke grup
dialoutmenggunakan:sudo adduser USERNAME dialout - Logout operator.
- Login operator.