
Halaman ini menjelaskan cara merakit pengontrol Android 13, yang mengontrol gerakan untuk platform pengujian sensor fusion dan pencahayaan untuk ITS-in-a-box. Pengujian sensor fusion adalah bagian dari Camera Image Test Suite (Camera ITS) dalam Compatibility Test Suite (CTS). Pengontrol Android 13 memungkinkan otomatisasi dengan mengontrol pencahayaan rig dan motor servo untuk adegan pengujian yang memerlukan rotasi dan kontrol pencahayaan.
Ringkasan pengontrol Android 13
ITS-in-a-box menyediakan lingkungan pengujian yang konsisten dengan jarak tetap antara tablet pengujian dan ponsel pengujian, selain pencahayaan yang konsisten tanpa sumber cahaya eksternal. Pengontrol Android 13 mengotomatiskan kontrol servo dan kontrol pencahayaan, serta menghilangkan kebutuhan untuk memutar DUT secara manual untuk pengujian adegan penggabungan sensor dan untuk mengaktifkan dan menonaktifkan lampu secara manual untuk pengujian yang dikontrol pencahayaan.
Kontrol servo dan pencahayaan dalam platform pengujian
Rig pengujian penggabungan sensor memberikan gerakan tetap ponsel untuk pengujian yang dapat direproduksi. Ponsel diputar di depan target papan catur untuk memungkinkan pengambilan gambar dengan ponsel di berbagai posisi. Untuk test_sensor_fusion, servo memutar ponsel di sekitar pusat sumbu kamera 90 derajat dan kembali dalam waktu sekitar 2 detik. Untuk test_video_stabilization, servo memutar ponsel di sekitar pusat sumbu kamera 10 derajat dan kembali berulang kali untuk meniru gerakan ponsel saat merekam video sambil berjalan. Gambar 1 menunjukkan dua ponsel yang bergerak dalam platform pengujian penggabungan sensor. Gambar 2 menunjukkan satu ponsel yang bergerak dalam platform pengujian sensor fusion.
Gambar 1. Gerakan ponsel dalam platform pengujian untuk test_sensor_fusion

Gambar 2. Gerakan ponsel dalam rig pengujian untuk test_video_stabilization
Kontrol motor servo
Motor servo analog dalam rig pengujian adalah servo posisi yang dikontrol menggunakan modulasi lebar pulsa (PWM). Contoh kontrol posisi standar ditunjukkan pada Gambar 3. Sinyal kontrol memiliki periode 20 ms. Mengubah lebar pulsa ke lebar minimum akan memindahkan motor ke posisi netral dan mengubah lebar pulsa ke lebar maksimum akan memindahkan motor 180 derajat searah jarum jam.
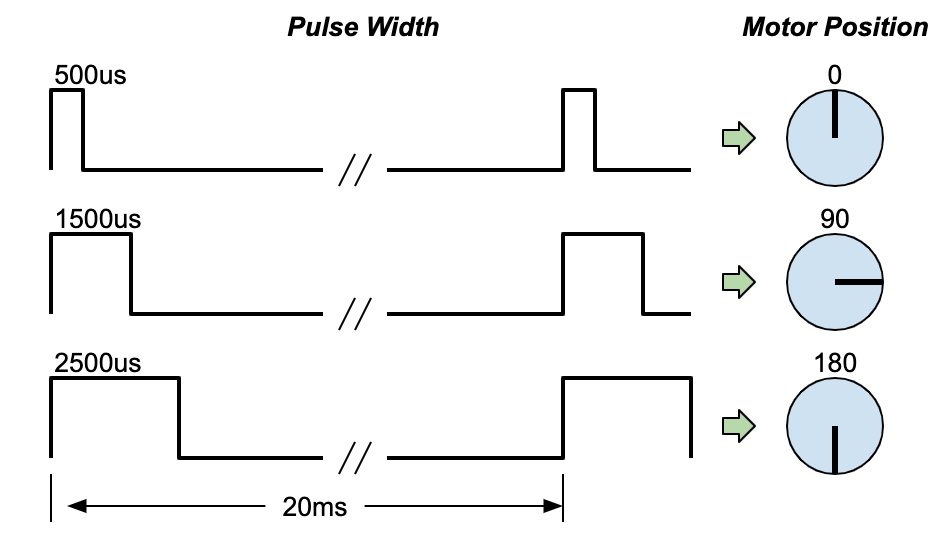
Gambar 3. Deskripsi kontrol servo umum
Kontrol pencahayaan
Untuk mengontrol gerakan motor servo dan lampu menggunakan komputer host, platform pengujian fusi sensor memerlukan koneksi USB. Pengontrol Android 13 menggunakan papan Arduino UNO R3 yang terhubung melalui USB dengan papan routing kustom (atau shield) yang dipasang di atasnya. Pengontrol Android 13 dapat mengontrol hingga tiga servo rotator platform penggabungan sensor, dan hingga tiga sistem pencahayaan ITS- in-a-box atau satu platform penggabungan sensor dari satu komputer host.
Pengontrol Android 13 revisi 3.0 memungkinkan pengguna menonaktifkan reset otomatis saat port serial Arduino dibuka melalui USB. Fungsi reset otomatis diaktifkan saat pengontrol dicolokkan ke host lain atau digunakan untuk kasus pengujian lainnya. Pengguna dapat mengaktifkan atau menonaktifkan reset otomatis menggunakan tombol fisik pada pengontrol.
Pengontrol Android 13 dapat berfungsi dengan ITS-in-a-box Kamera apa pun. Pengontrol Android 13 dapat dihubungkan ke Camera ITS-in-a-box (RFoV, WFoV, Modular) atau Sensor Fusion box untuk melakukan pengujian yang dikontrol pencahayaannya. Mulai Android 15, semua pengujian yang dikontrol pencahayaan disertakan dalam scene_flash dan dapat dijalankan menggunakan kotak sensor fusion, kecuali scene_low_light, yang memerlukan tablet untuk tampilan grafik dan harus dijalankan menggunakan Camera ITS-in-a-box.
Untuk pengujian di scene_flash dan scene_low_light, diperlukan lingkungan gelap dengan lampu dimatikan untuk memicu fungsi flash otomatis di ponsel pengujian. Gambar 4 menunjukkan lampu di ITS-in-a-box yang dimatikan dan dinyalakan oleh pengontrol Android 13.
Gambar 4. Lampu dimatikan dan dinyalakan untuk test_auto_flash
Histori revisi
Tabel berikut menjelaskan histori revisi pengontrol Android 13 dan menyertakan link download ke setiap versi file produksi.
| Tanggal | Revisi | Download file produksi | Log perubahan |
|---|---|---|---|
| Agustus 2024 | 3.0 |
|
|
| Desember 2022 | 2.2 |
|
|
| Maret 2022 | 1 |
|
Penyiapan pengontrol Android 13
Bagian ini menjelaskan cara menyiapkan pengontrol Android 13.
Komponen yang diperlukan
Anda dapat membeli pengontrol Android 13 melalui salah satu vendor yang memenuhi syarat atau Anda dapat membuat pengontrol sendiri. File produksi terdiri dari file Gerber PCB, daftar materi (BOM) PCB, informasi penempatan PCB, dan file STEP penutup. Untuk mendownload file produksi, lihat tabel di Histori revisi.
Jika Anda membuat pengontrol sendiri, Anda harus memiliki papan Arduino UNO R3. Jika membeli pengontrol melalui vendor yang memenuhi syarat, Arduino akan disertakan.
Penutup pengontrol Android 13 adalah komponen opsional, tetapi direkomendasikan untuk melindungi pengontrol dan memblokir port USB yang tidak digunakan untuk mencegah kesalahan penyiapan. Untuk mengetahui detail tentang harga dan opsi pengontrol, hubungi vendor yang memenuhi syarat.
Prosedur penyiapan
Untuk menyiapkan pengontrol Android 13, ikuti langkah-langkah berikut:
Hubungkan adaptor 12 V (untuk pencahayaan) dan 5 V (untuk servo) ke jack daya yang sesuai (Gambar 5).
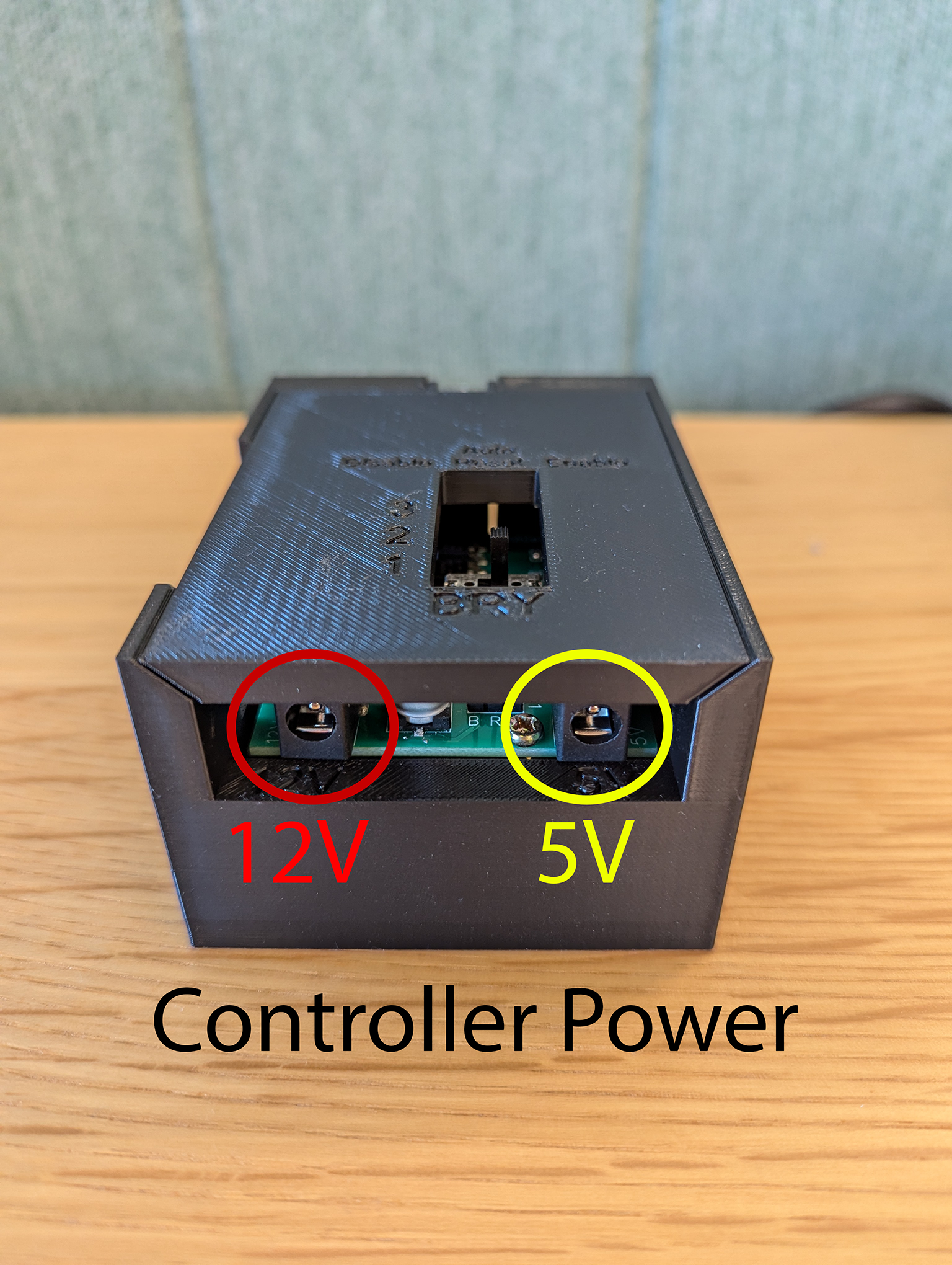
Gambar 5. Lokasi adaptor daya
Hubungkan lampu ITS-in-a-box atau Sensor Fusion box ke salah satu jack output saluran pencahayaan (Gambar 6). Bergantung pada penggunaan barrel daya lampu, gunakan adaptor sesuai kebutuhan (Gambar 7).

Gambar 6. Lokasi output saluran pencahayaan

Gambar 7. Adaptor yang menghubungkan daya pencahayaan ke pengontrol
Untuk menyiapkan adegan sensor_fusion, hubungkan servo ke salah satu header koneksi saluran servo.

Gambar 8. Lokasi koneksi servo
Untuk pengontrol revisi 3.0, saat menghubungkan pengontrol ke host baru, sakelar reset otomatis harus disetel ke
Enable.Untuk revisi 3.0, pengontrol menyertakan tombol reset otomatis yang dapat diaktifkan atau dinonaktifkan. Saat menguji, sebaiknya setel tombol reset otomatis ke
Disableuntuk mencegah semua lampu mati sesaat di awal setiap pengujian karenaits_base_testmembuat komunikasi dengan pengontrol Arduino. Hal ini sangat penting saat menjalankan pengujian paralel (ITS berjalan secara bersamaan dengan sistem pencahayaan unit pengujian yang terhubung ke pengontrol yang sama).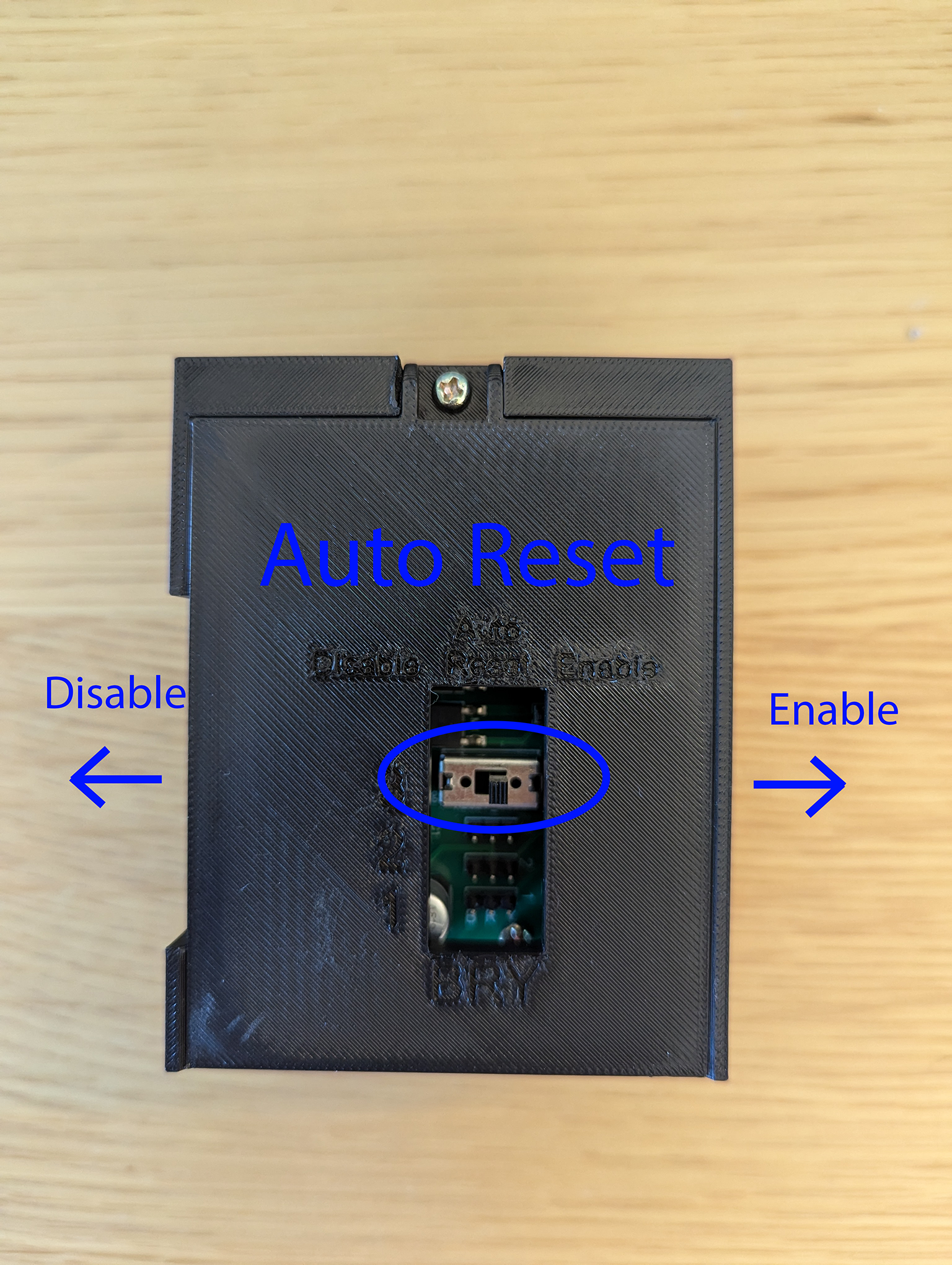
Gambar 9. Tombol reset otomatis
Hubungkan pengontrol ke host dengan kabel USB-A.

Gambar 10. Port koneksi USB-A ke host
Gambar 11 menunjukkan contoh penyiapan pengontrol Android 13 yang telah selesai untuk satu sistem pencahayaan dan servo.
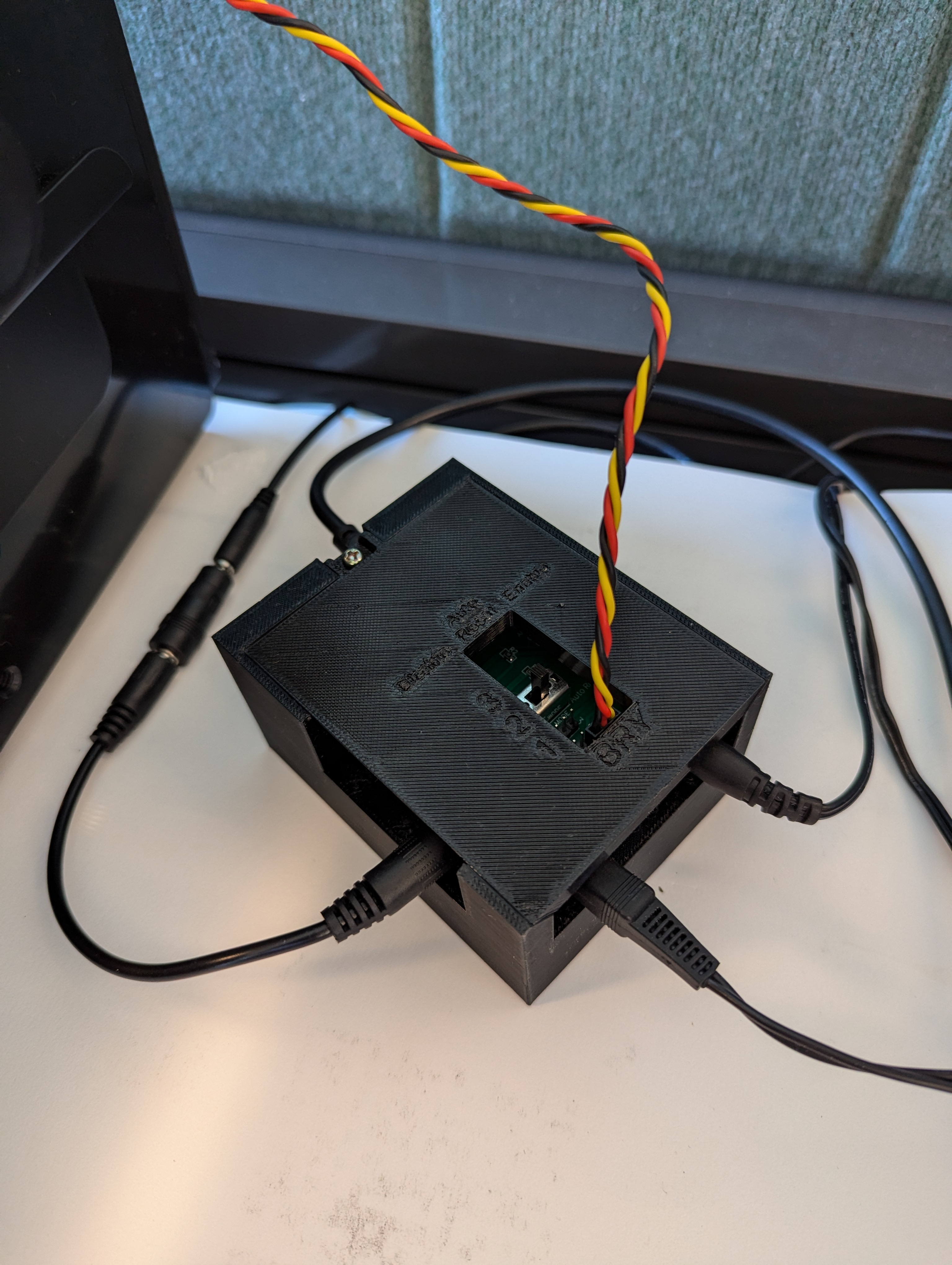
Gambar 11. Penyiapan pengontrol Android 13 selesai
Kontrol software dari penyelenggara
Kode mikro dapat didownload ke UNO untuk menetapkan pin PWM ke sinyal motor dan menentukan rentang lebar pulsa untuk sudut yang berbeda. Kode mikro
untuk kontrol rotasi servo dari enam motor HS-755MB disertakan dalam
Referensi lainnya. Bagian tersebut juga menyertakan link ke program sederhana bernama rotator.py, yang memutar servo.
Menggunakan pengontrol Android 13
Penggunaan ITS kamera:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
Dengan skrip pengujian yang disertakan:
python rotator.py --ch 1 --dir ON --debug