
このページでは、Sensor Fusion Box の購入と組み立ての方法について説明します。Sensor Fusion Box は、CameraITS sensor_fusion テストと multi-camera 同期テストで使用されます。これにより、Android デバイスのセンサー(特にカメラ イメージ センサーとジャイロスコープ)のタイムスタンプ精度を測定する一貫したテスト環境が提供されます。Sensor Fusion Box は、CAD 図面からレーザーカットされたプラスチック製の箱型部品とサーボ制御ボックスで構成されています。
Sensor Fusion Box は、購入することも、自分で製作することもできます。
Sensor Fusion Box の購入
次の認定ベンダーから Sensor Fusion Box を購入することをおすすめします。
Byte Bridge Inc.
USA: 1502 Crocker Ave, Hayward, CA 94544-7037
China: 22F #06-08, Hongwell International Plaza Tower A, 1600 West Zhongshan Road, Xuhui, Shanghai, 200235
www.bytebt.com
androidpartner@bytebt.com
USA: +1-510-373-8899
China: +86-400-8866-490JFT CO LTD 捷富通科技有限公司(旧社名: MYWAY DESIGN)
China: No. 40, Lane 22, Heai Road, Wujing Town, Minhang District, Shanghai, China
Taiwan: 4F., No. 163, Fu-Ying Road, XinZhuang District, New Taipei City 242, Taiwan
www.jftcoltd.com
service@jfttec.com or its.sales@jfttec.com
China: +86-021-64909136
Taiwan: 886-2-29089060
Sensor Fusion Box の製作
このセクションでは、レーザーカットされたアクリロニトリル ブタジエン スチレン(ABS)製の部品(図 1)から Sensor Fusion Box を組み立てる手順を説明します。
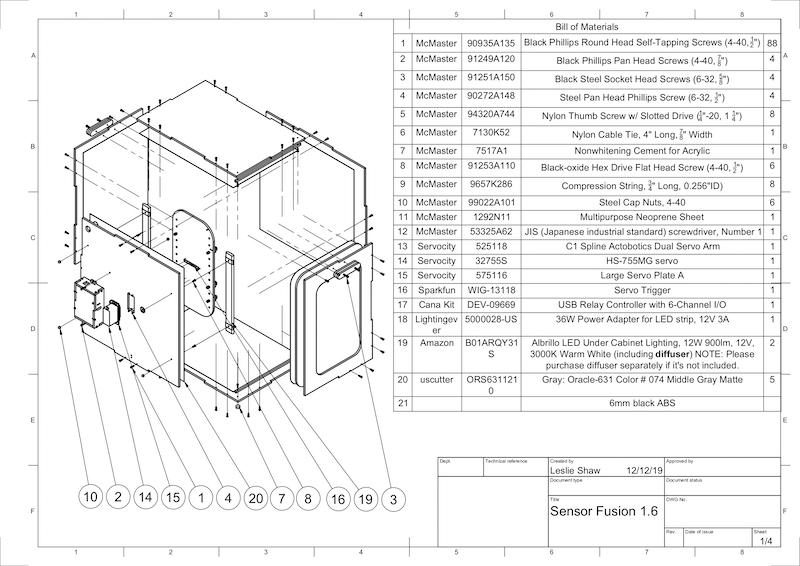
図 1. Sensor Fusion Box の部品の機械製図
必要な工具
始める前に、Sensor Fusion Box の技術図面(Sensor Fusion Box の ZIP ファイルに含まれています)をダウンロードし、以下の工具を用意します。
- プラス ドライバー
- JIS ねじ用ドライバー
- 六角レンチ
- 電動ドリルセット
- カッターナイフ
- テープ
ステップ 1: ビニールのステッカーを貼り付ける
レーザー カッターで ABS 部品を作成したら、テストボックス内部の色彩を適切に管理するために、ビニールのステッカーをプラスチックの箱に貼り付けます。
図 2 のように、ABS の滑らかな面にビニールを貼り付けます。ビニールを貼り付ける方法については、wikiHow を参考にしてください。
必要な穴をビニールにカッターナイフで開けます。

図 2. 滑らかな面(箱の内側)にビニールを貼り付けた ABS 部品アクリル製の接着剤を使って、丸い ABS 部品を底部パネルの四隅に接着します。

図 3. 丸い ABS 部品を四隅に接着した底部パネル
ステップ 2: スマートフォン マウントを準備し、サーボマウントを取り付ける
次のようにして、スマートフォン マウントを準備してサーボに取り付けます。
1/4 インチ - 20 のドリルビットを使ってスマートフォン固定具にねじ穴を 20 個切ります。

図 4. ねじ穴を切ったスマートフォン固定具ABS の切り出し、ナイロンのつまみねじ、ナイロンのナット(必要に応じてねじの高さを調整するため)、C1 スプラインの Actobotics デュアルサーボ アーム、4-40 ねじ、圧縮ばねがあることを確認します。

図 5. スマートフォン マウントの部品4-40 ねじでスマートフォン マウントの背面にサーボアームを固定します(1.2 N*m または 8.9 in*lbf)。同じねじと 4-40 のキャップナットで、スマートフォン マウント前面にスマートフォン仕切りの ABS の切り出しを固定します。

図 6. 前面からねじ止めされた固定具背面のシャフト
図 7. 4-40、長さ 3/4 インチのねじと 4-40 キャップナット
図 8. スマートフォン マウントの背面(左)と前面(右)
ステップ 3: スマートフォン クランプを取り付ける
次のようにして、スマートフォン クランプを取り付けます。
ABS の切り出しのクランプの形状に従って、ネオプレン シートをカットします。ただし、図 9 のように両端から 1 インチ(25 mm)は残します。ネオプレン シートをカットしたら、図 8 のように ABS の切り出しのクランプに部品を取り付けます。

図 9. ネオプレン シートを貼った ABS のクランプナイロンつまみねじと圧縮ばねをクランプに取り付けます。必要に応じて、ナイロンナットを追加してねじ長を短くします。

図 10. ネオプレン シート、つまみねじ、ナイロンナット、圧縮ばねを取り付けたクランプ図 11 のように、スマートフォン固定具のねじ穴にスマートフォン クランプのつまみねじを締め付けます。スマートフォン マウントの位置は、スマートフォンのサイズに応じて調整できます。

図 11. スマートフォン固定具の機械製図
図 12. 組み立て済みのスマートフォン固定具
ステップ 4: 引き戸用レールを組み立てる
箱の上部と底部の引き戸用レールを前面に固定します。図 13 は、あらかじめ切っておいたねじ穴に差し込んだ 6-32 ねじを示しています。代わりに、タッピングねじを使用することもできます。

図 13. 箱の上部と底部に固定された引き戸用レール
ステップ 5: 照明を取り付ける
次のようにして、ライト ブラケットとディフューザーを取り付けます。
2 つのハンドル部品を重ねて、6-32 ねじで固定します(または、タッピングねじを使用します)。

図 14. Sensor Fusion Box のハンドル部品と組み立て4 組の 4-40 ねじ、ナット、袋ナットを用意して、照明キットに付属のマウント ブラケットを箱の壁面に固定します。

図 15. 箱の内壁の 4-40 ねじとライト ブラケット
図 16. 箱の外面からねじに取り付けられたナットと袋ナットライト ストリップを巻くのに適切なサイズにライト ディフューザーを切断します(ライトにディフューザーが付属している場合には必要ありません)。

図 17. ライト ストリップとライト ディフューザーライト ディフューザーをストリップのまわりに巻いて、テープを使って背面で固定します。

図 18. 背面からテープで固定されたライト ストリップとライト ディフューザーライトをブラケットにはめ込みます(きつい場合があります)。

図 19. ブラケットに取り付けた後のライト
ステップ 6: スマートフォン固定具をサーボプレートに取り付ける
次のようにして、スマートフォン固定具をサーボプレートに取り付けます。
4 本の 6-32 ねじとサーボプレートを用意して、壁にサーボを固定します。 サーボを内壁に固定し、外壁のサーボプレートに内側からねじを差し込みます。

図 20. 6-32 ねじで固定したサーボとサーボプレートナイロックを使ってスマートフォン固定具をサーボに固定します。シャフトの中心をサーボの回転中心に押し込みます。

図 21. サーボギア
サーボに付属のサーボねじを使用し、サーボアームを貫通させてサーボギアにスマートフォン固定具をねじ止めします(1.2 N*m または 8.9 in*lbf)。

図 22. サーボアーム
ステップ 7: 最終組み立て
次のようにして、Sensor Fusion Box の組み立てを完了させます。
Android 13 以上では、センサー フュージョン テスト装置に Android 13 Arduino 照明コントローラが付属します(Android 12 以下では、センサー フュージョン装置が、6 チャンネル Arduino コントローラか、Canakit コントローラが付属した状態で出荷されます。Android 11 から Android 12 までを搭載したデバイスは、Android 13 コントローラ、6 チャンネル Arduino コントローラ、または Canakit コントローラに対応しています)。サーボ拡張機能をサーボ コントローラの任意のチャンネルに接続します。GND は黒いワイヤー、VCC は赤いワイヤー、SIG は黄色いワイヤーに対応しています。
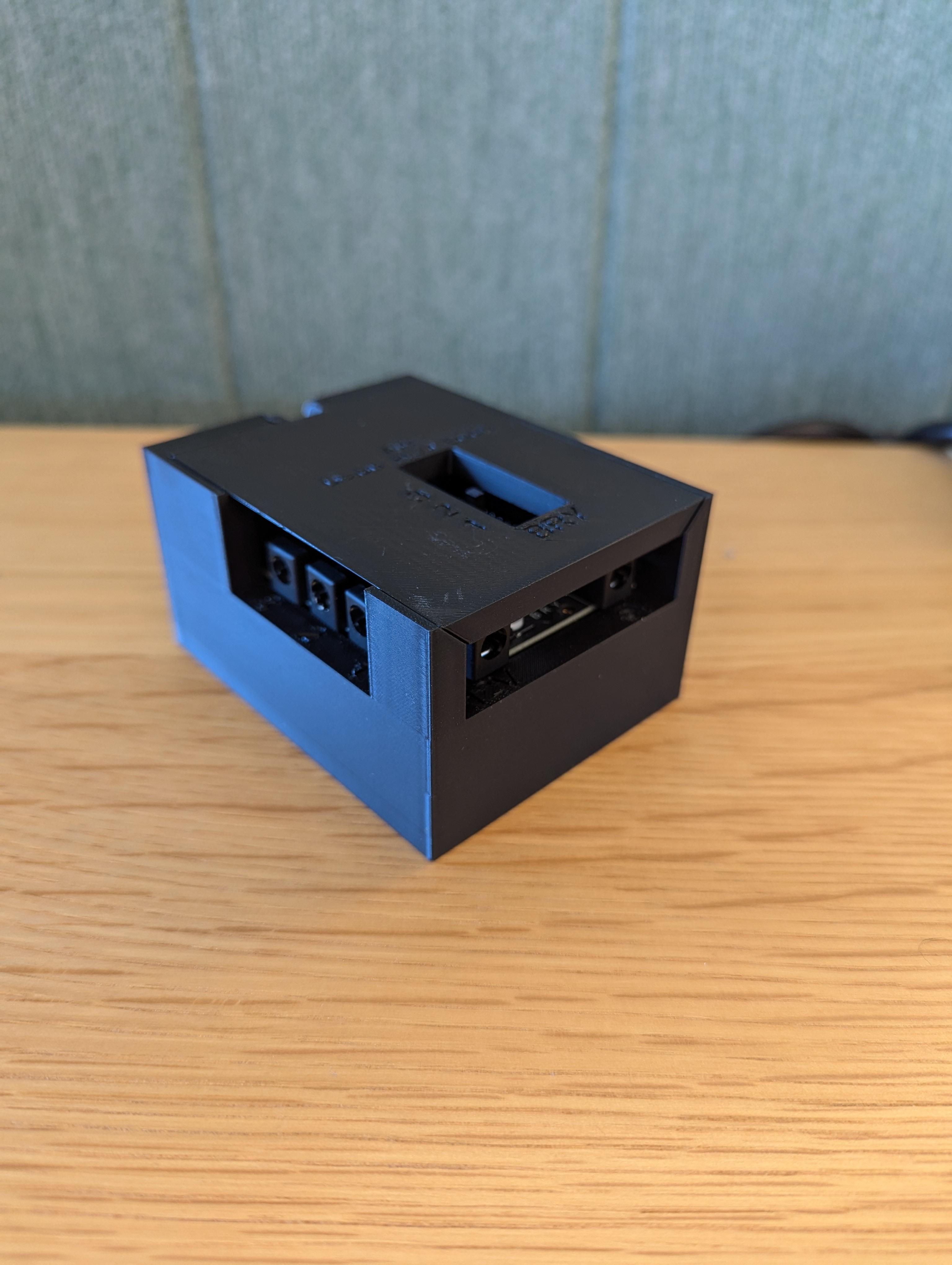
図 23. Arduino 照明コントローラ Rev3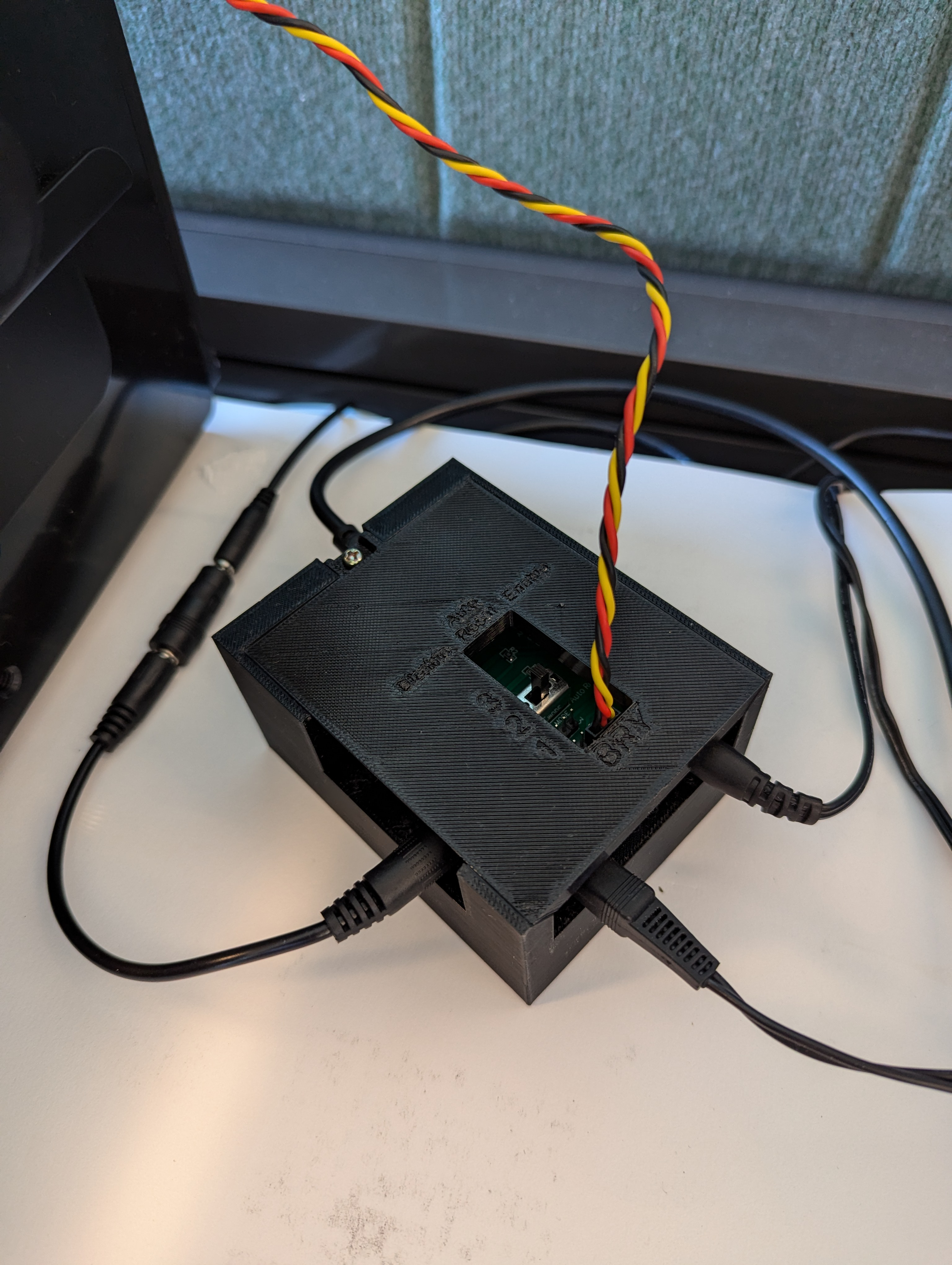
図 24. Arduino 照明コントローラ Rev3 の接続例箱をテープで貼り合わせ、部品をねじで組み合わせます。一部の部品にはあらかじめ穴を開けておく必要があります。

図 25. テープで固定されたセンサー フュージョン テスト装置
Android 15 以上の場合は、近所のプリント ショップで checkerboard.pdf ファイル(コードベースの
test/sensor_fusionディレクトリにあります)を印刷してもらいます。用紙のサイズは 18 x 18 インチ、チェッカーボードのパターンを用紙の幅にします。そして、チャートをスマートフォン固定具の反対側の壁に貼ります。望遠カメラなどの画角の狭いカメラの場合は、近所のプリント ショップで縦横比を保存した縮小版を作ってもらいます(たとえば、50% に縮小したチャートは 9 x 9 インチの用紙に印刷されます)。
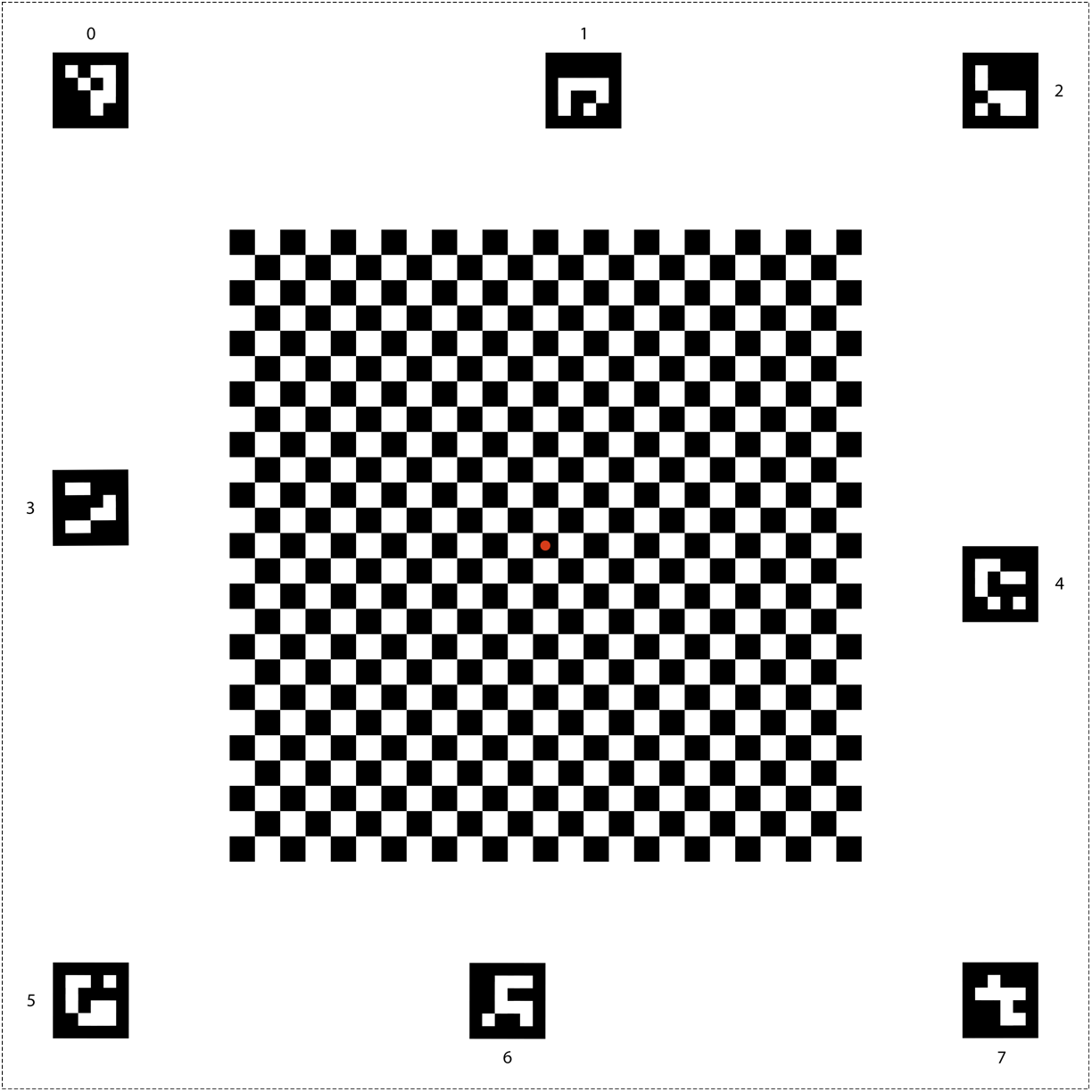
図 26. Android 15 以上用のチェッカーボード チャート
図 27 のように、固定具に置いたとき、チェッカーボードの中心にある赤い点が、カメラにまっすぐ向いていることを確認します。
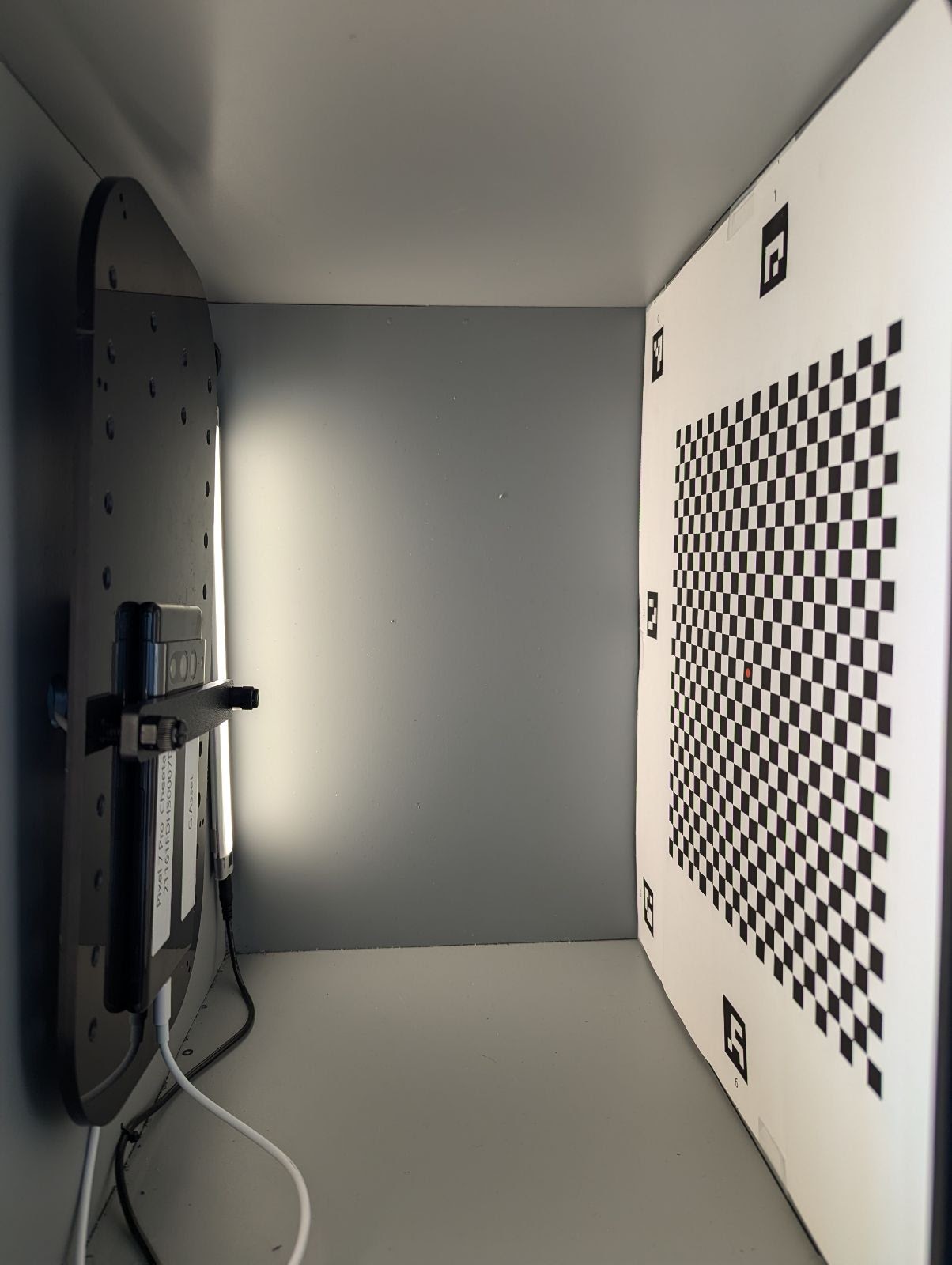
図 27. 印刷され、スマートフォン固定具の反対側の壁にテープで貼られたチェッカーボード