
本頁介紹如何為傳感器融合測試台組裝修訂版 2 控制器。傳感器融合測試是兼容性測試套件(CTS) 中相機圖像測試套件(Camera ITS) 的一部分。 rev2 控制器旨在簡化組裝並降低成本。其他好處是電子設備和伺服系統之間的電源隔離以及從單個控制器控制多達六個伺服系統。
修訂版 2 傳感器融合控制器概述
傳感器融合試驗台
傳感器融合測試台為可重複測試提供手機的固定運動。手機在棋盤目標前旋轉,以允許手機在不同位置拍攝圖像。測試台將手機圍繞軸的相機中心旋轉 90 度,然後在大約 2 秒內旋轉回來。圖 1 顯示了在傳感器融合測試台中移動的兩部手機。
圖 1.測試台中的手機移動
伺服電機控制
測試台中的模擬伺服電機是使用脈衝寬度調製 (PWM) 控制的位置伺服電機。典型的位置控制示例如圖 2 所示。控制信號的周期為 20 ms。將脈衝寬度更改為最小寬度會使電機移動到中性位置,將脈衝寬度更改為最大寬度會使電機順時針移動 180 度。
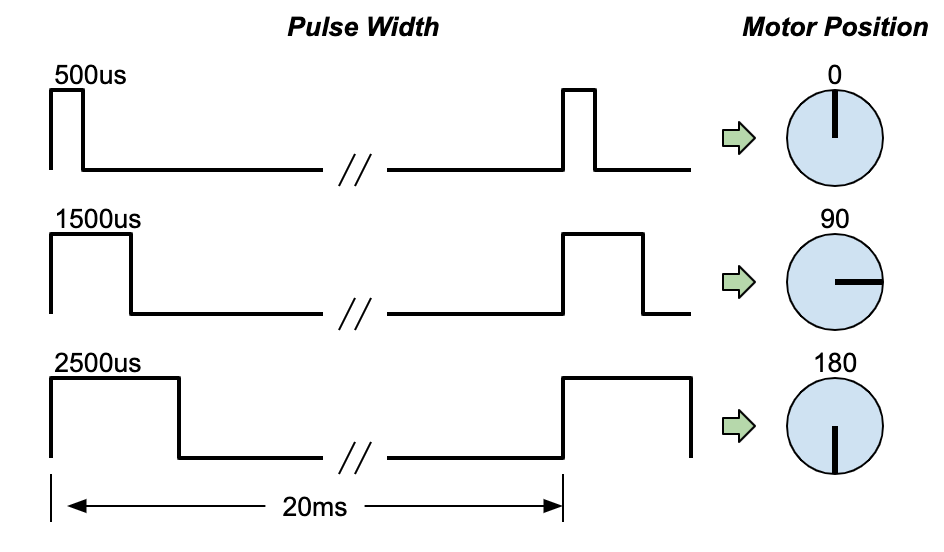
圖 2.典型的伺服控制描述
傳感器融合控制器實現
要通過主機控制伺服電機運動,傳感器融合測試台需要 USB 連接。測試台 rev2 控制器使用 USB 連接的 Arduino UNO R3 板,頂部安裝有自定義路由板(或屏蔽)。兩層屏蔽採用開源在線 PCB 設計工具設計,可在https://easyeda.com/portmannc/servo_controller獲得。定制佈線屏蔽的頂視圖和底視圖如圖 3 和圖 4 所示。
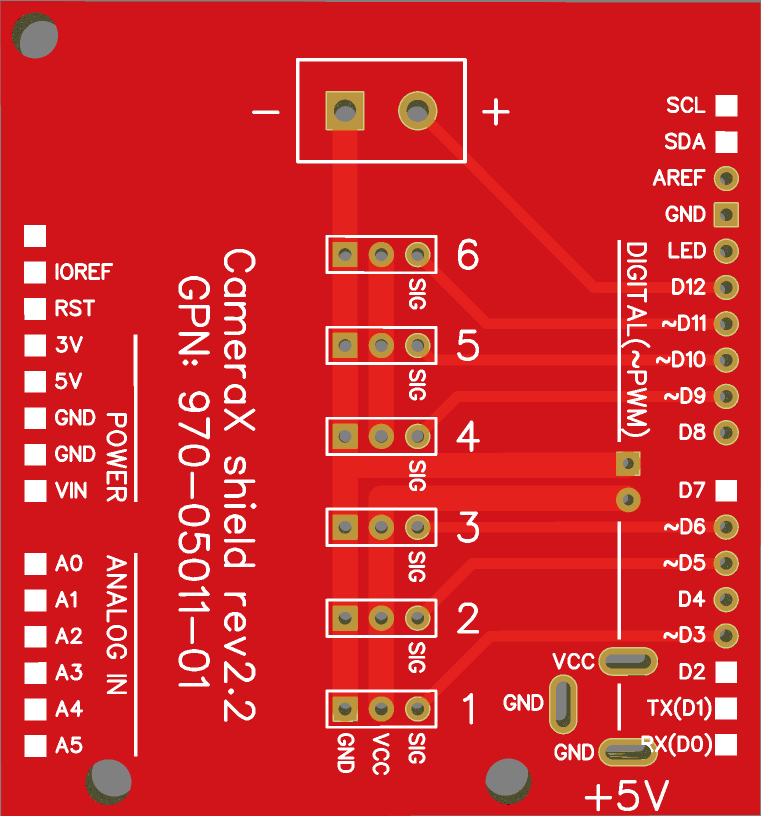
圖 3.自定義佈線屏蔽(頂視圖)
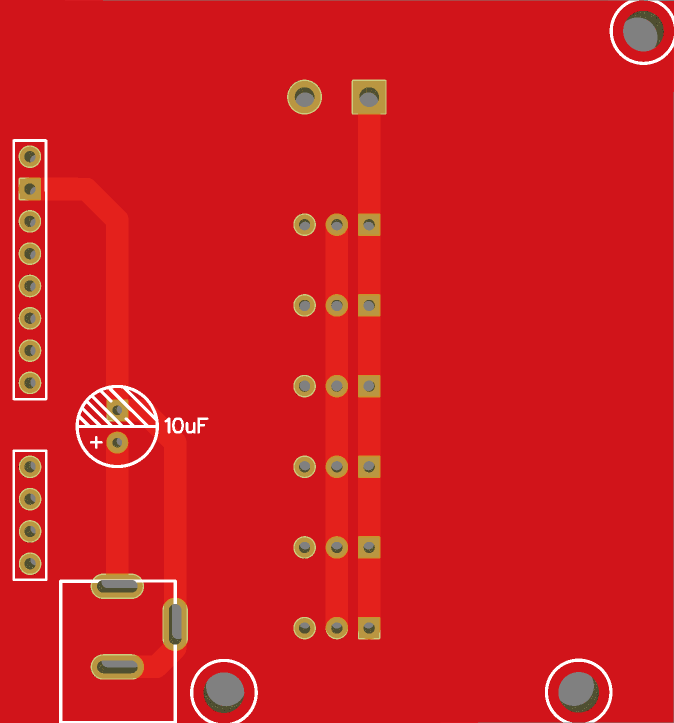
圖 4.自定義佈線屏蔽(底視圖)
rev2 傳感器融合控制器可以從單個主機控制多達六個傳感器融合裝置。頂視圖顯示了沿中心軸安裝六個 3 針電機接頭的絲印輪廓。頂部有一個額外的連接器,此項目未使用。底部視圖顯示了與 UNO、5 V 電源插孔和 10 uF 旁路電容器配合所需的 4 和 8 引腳接頭連接的絲印輪廓。
為了隔離伺服電流,通過外部 5 V 插孔為伺服系統供電。 UNO 電子設備通過 USB 連接器單獨供電,兩個板之間不共享電源。請注意,UNO 上現有的外部電源插孔未使用,並且在外殼設計中被遮蓋,以避免在將電源連接到控制器時混淆。
組裝 rev2 傳感器融合控制器
物料清單 (BOM)
| 數量 | 描述 | PN/鏈接 |
|---|---|---|
| 1 | 1.6 mm 厚的傳感器融合佈線板 | https://easyeda.com/portmannc/servo_controller |
| 1 | Arduino UNO R3 | https://store.arduino.cc/usa/arduino-uno-rev3 |
| 1 | 2.1x5.5 mm,5 V 通孔,直角筒形插孔 | 101179 |
| 1 | 16 V、10%、10 uF 鉭電容 | TAP106K016CCS |
| 1 | 1x2、200 mil (5.08 mm) 間距、通孔 Phoenix Contact 接頭 | 651-1755736 |
| 6 | 1x3x,100 mil (2.54 mm) 間距,通孔公頭 | 732-5316-ND |
| 1 | 1x8x,100 mil (2.54 mm) 間距,通孔公頭 | 732-5321-ND |
| 1 | 1x4x,100 mil (2.54 mm) 間距,通孔公頭 | 732-5317-ND |
| 3 | 11 毫米內螺紋支架(5 毫米寬,M3-0.5 螺紋) | R30-1001102 |
| 4 | 6 毫米公母支架(5 毫米寬,M3-0.5 螺紋) | R30-3000602 |
| 3 | M3-0.5 6 mm 平頭小螺釘 | 36-9191-3-ND |
| 4 | M3-0.5 8 mm 平頭機螺釘 | XM2510008A20000 |
| 2 | M3-0.5 6 mm 平頭機螺釘 | XM2510006A20000 |
| 6 | #4,1/2 英寸圓頭鈑金螺釘 | 90925A110 |
| 1 | 5 V、15 W UL 認證電源,2.1x5.5 mm 插頭(電機) | 36-9191-3-ND |
需要的其他工具
- 烙鐵、焊錫、吸錫器
- 小十字螺絲刀
- 尺寸 T10 Torx 螺絲刀
填充路由板
用適合其輪廓的部件填充佈線板的頂部和底部。對於板的底部,可以通過將插頭放置在 Arduino 板中的正確位置並將佈線板放在連接器頂部來對齊公頭。然後可以將 1x8 和 1x4 接頭焊接到位,確保 Arduino 和佈線板之間的良好對齊。電源插孔也可以這樣做,但緊密組裝需要墊片,因為組裝後電源插孔不會停留在 Arduino 上。焊接旁路電容器後,板的頂部可以填充六個用於電機控制的 1x3 公接頭和 1x2 Phoenix Contact 接頭。請注意,插頭的方向應使卡入式連接器的底部朝向電機,以便為電機安裝提供最大空間。
當所有組件都焊接到位後,可以使用支架和螺釘組裝系統。有四個公母 6 毫米支座,可在 Arduino 和塑料外殼底部之間提供機械穩定性。然而,在 Arduino 和定制屏蔽之間只有三個 11 mm 母對母支架,因為 Arduino 上的一個孔(靠近 SCL 引腳的那個)由於靠近 Arduino 上的母頭而無法使用。將三個女性-女性支架擰到三個男性-女性支架上,以將支架固定到 Arduino。然後用三個 M3 螺釘將佈線板屏蔽連接到支架上。圖 5 顯示了安裝在 Arduino 上的填充屏蔽的概念化端視圖。圖 6 顯示了已安裝和安裝的系統的照片。
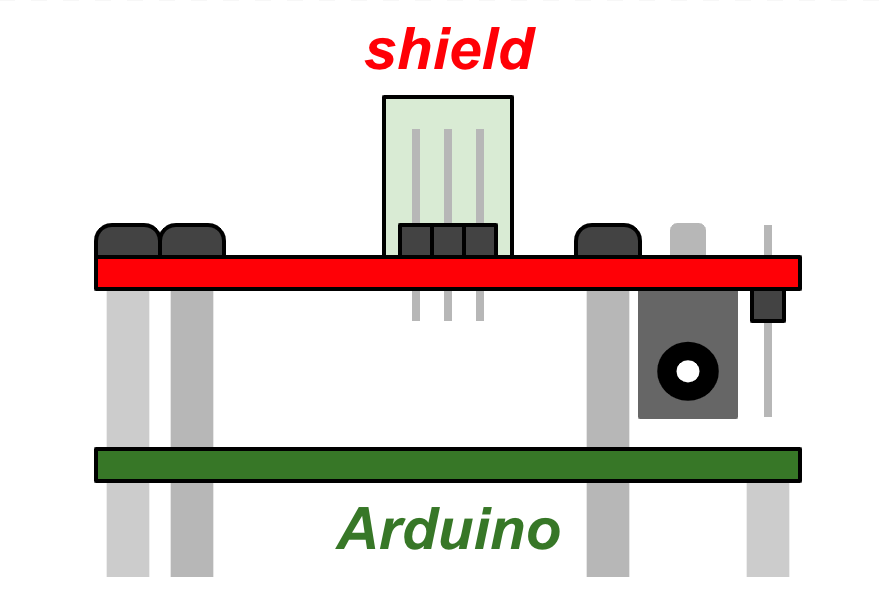
圖 5.顯示的帶有接頭、電源插孔和墊片的填充屏蔽(概念化端視圖)
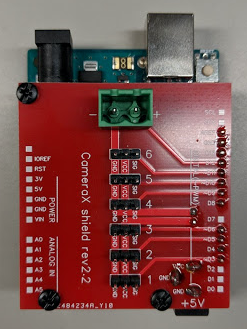
圖 6.安裝在 Arduino 上的填充 rev2.2 擴展板(頂視圖)
控制器外殼
控制器包括一個定制外殼。機械圖如圖7所示。
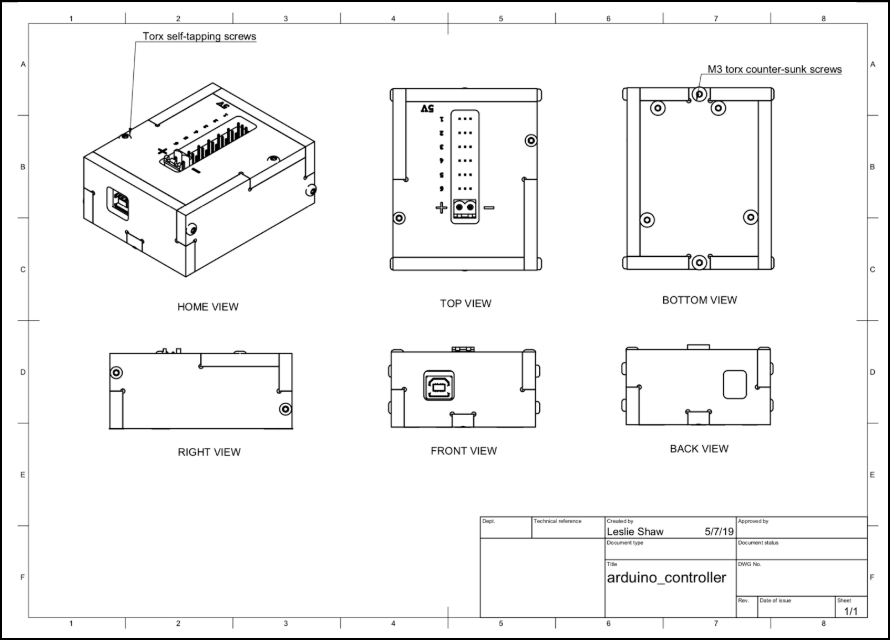
圖 7.外殼機械圖
組裝好的控制器通過外殼底板的四個埋頭螺釘安裝到外殼上。外殼可以通過六個圓頭和兩個平頭組裝螺釘進行組裝。相關信息,例如伺服編號順序和 5 V 外部電源,蝕刻在塑料頂部。圖 8 顯示了組裝外殼內的控制器照片。
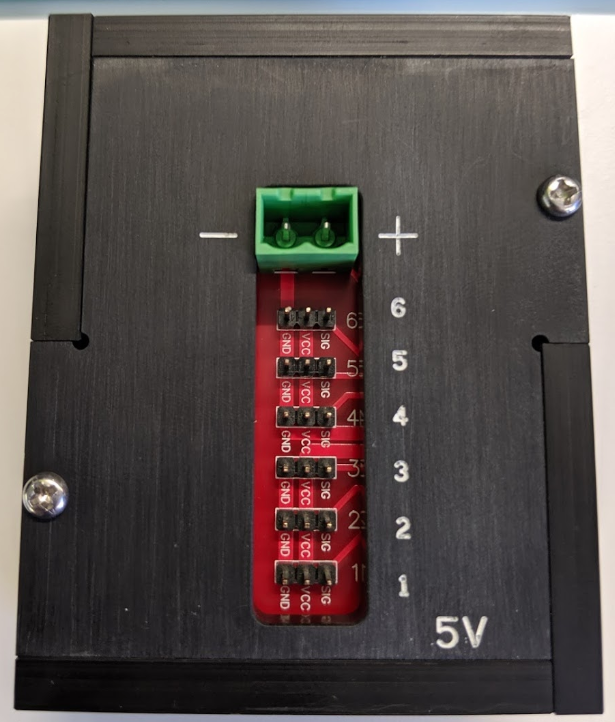
圖 8.外殼中的組裝系統
來自主機的軟件控制
可以將微代碼下載到 UNO 以將 PWM 引腳分配給電機信號並定義不同角度的脈衝寬度範圍。六台 HS-755MB 電機的伺服旋轉控制微代碼包含在其他資源中。該部分還包括一個名為rotator.py的簡單程序的鏈接,該程序可以旋轉伺服系統。
使用 rev2 控制器
相機 ITS 用途:
python tools/run_all_tests.py device=device_id camera=0 rot_rig=arduino:1 scenes=sensor_fusion
使用包含的測試腳本:
python rotator.py --ch 1 --dir ON --debug